Ejemplos de Mapas Generados desde la plataforma GSIM
Dr. José Luis Silván Cárdenas
Tabla de contenido
Graficas de series de tiempo y otras herramientas de consulta
Visualización en dos paneles y operadores binarios
Uso de capas vectoriales pre-cargadas
GSIM es el acrónimo de Global Spectral Index Mapper, una app de visualización, consulta y descarga de índices espectrales desarrollado en Google Earth Engine Apps. La plataforma permite el cómputo cerca de 200 índices espectrales a partir de colecciones de imágenes satelitales de libre acceso que están disponibles en Google Earth Engine. La plataforma puede ser empleada para generar mapas de índices que luego puedes compartir vía el url.
Los ejemplos incluidos abajo se han generado para ilustrar datos y funcionalidades disponibles en la plataforma, las imágenes incluidas en el documento son copias estáticas de los mapas generados, pero puedes dar clic en ellas para generar el mapa vivo en la plataforma. Al abrir el url, el mapa se genera en el mismo orden en que fue construido, por lo que en el caso de dos paneles existen retrasos en su carga y no se debe interactuar con la app hasta que termine la construcción del mismo. (La vista del mapa interactivo podría variar por actualización de la app.)
Para acceder a la plataforma con el mapa por default use el siguiente vínculo:
https://jsilvan.users.earthengine.app/view/indices-espectrales-globales
GSIM permite mostrar el índice y/o el compuesto sobre el que se basa el índice, en uno o dos paneles. Adicionalmente, permite mostrar la leyenda de la(s) capa(s) activa(s) (Map Apearance/Show legend) y un mapa del área visible (Map Apearance/Show inset map). Los siguientes son ejemplos de configuraciones a un solo panel.
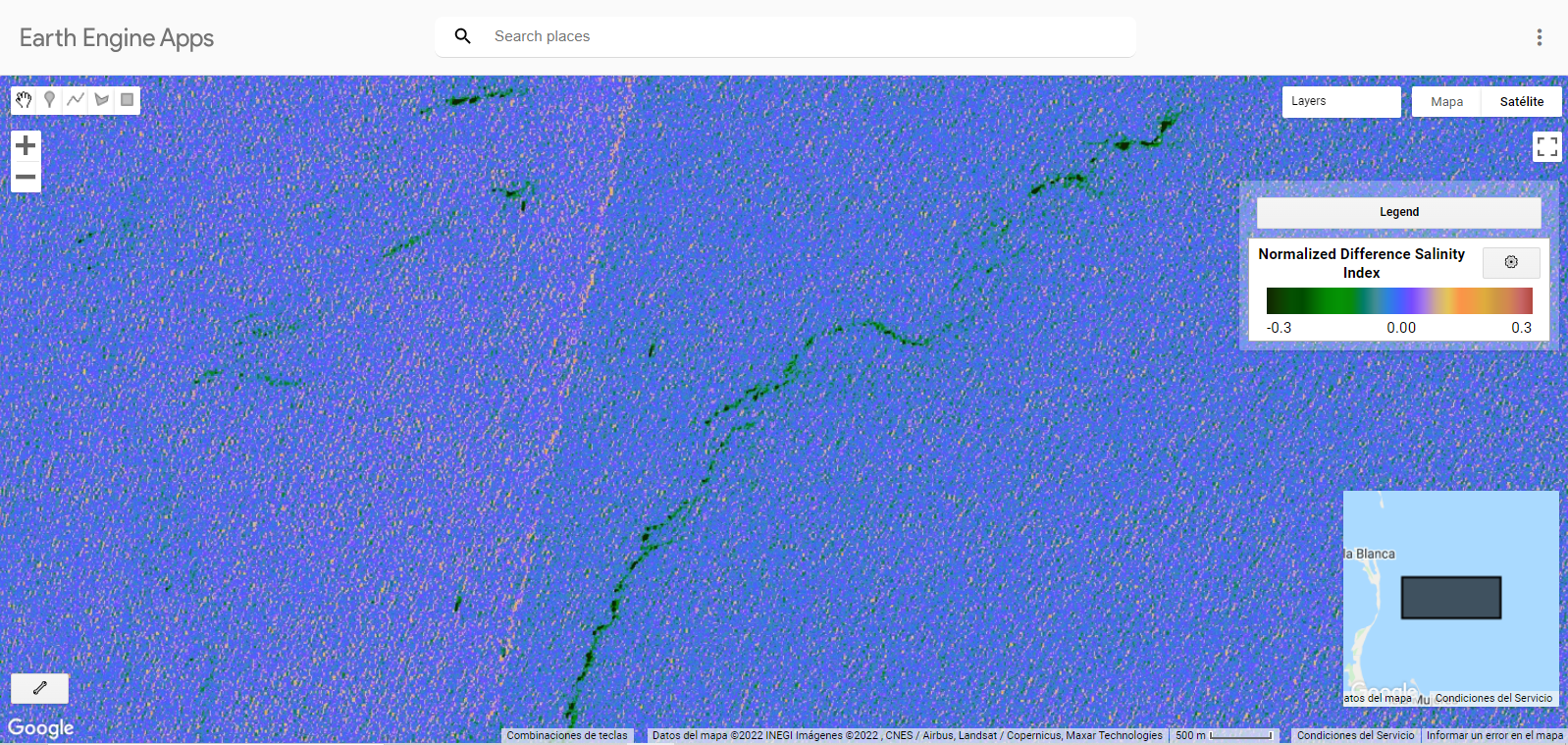
Este mapa muestra la variación del índice de salindad (NDSaI - Normalized Difference Salinity Index) con imágenes Sentinel-2, durante la arribazón de sargazo en 1-jun-2019 hacia las costas de Cancún. La franja azul-verde muestra una banda serpenteante de baja salinidad que corresponde al sargazo flotante. Se incluye el mapa llave y la leyenda del índice.
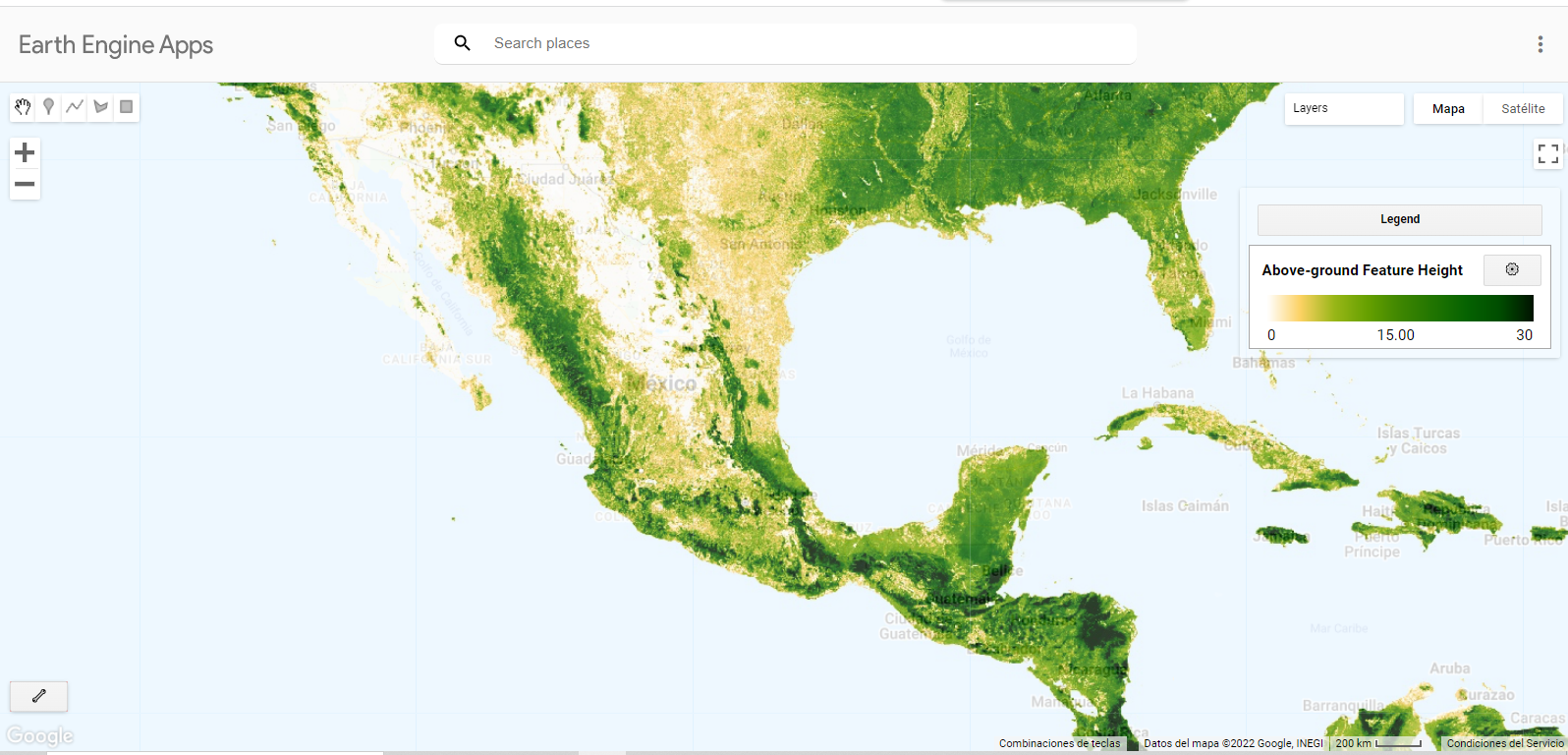
La altura de los árboles está estrechamente relacionada con la biomasa forestal, que es una medida de la cantidad de Carbono almacenado en los bosques. Este mapa muestra la altura de arbolado estimada con un LiDAR satelital llamado The Geoscience Laser Altimeter System (GLAS), junto con mediciones in situ.
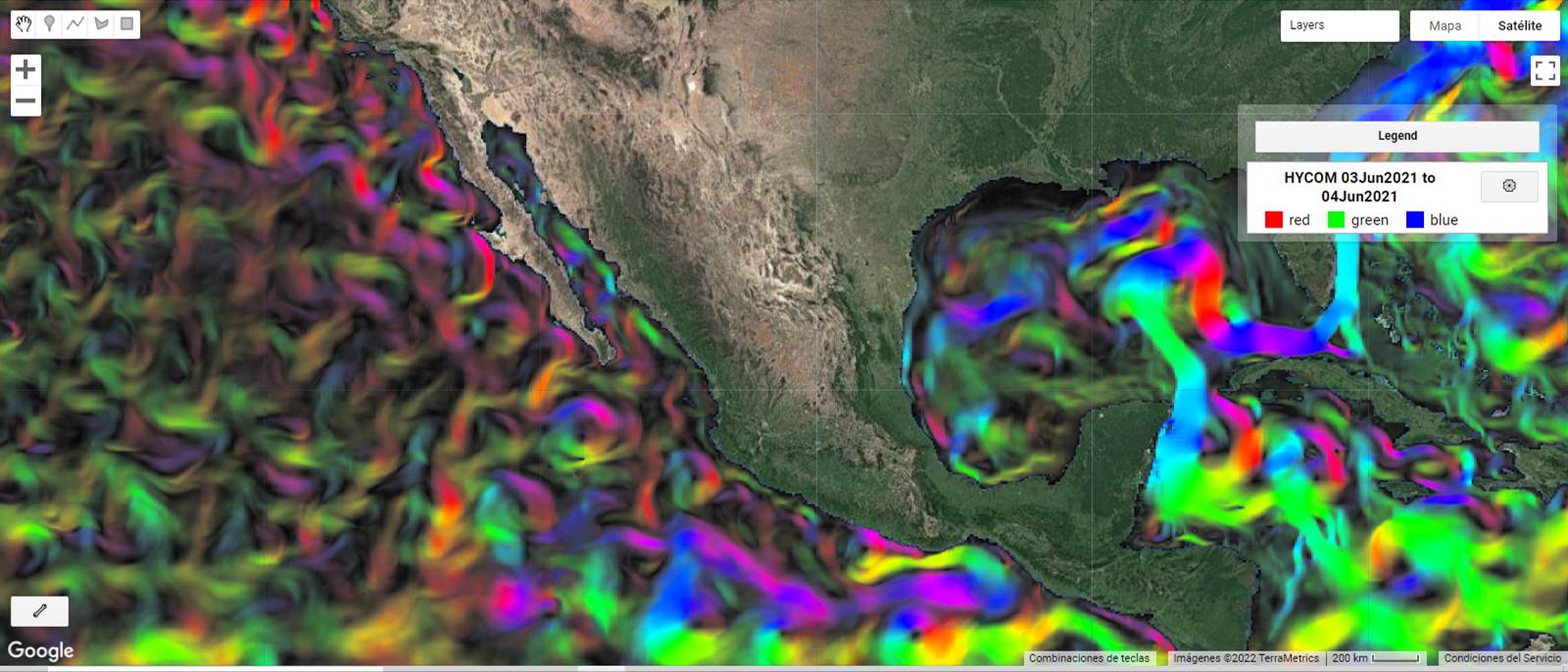
La siguiente es una visualización de la velocidad superficial del mar del HYCOM (HYbrid Coordinate Ocean Model) del 3 de Jun del 2021. La composición de color RGB fue generada en el espacio HSV donde el color (H) corresponde a la dirección de la velocidad y la saturación y valor (S=V) corresponden a la magnitud de la velocidad, lo que permite ver las corrientes superficiales como citas multicolor, como la corriente de lazo en el golfo de México.
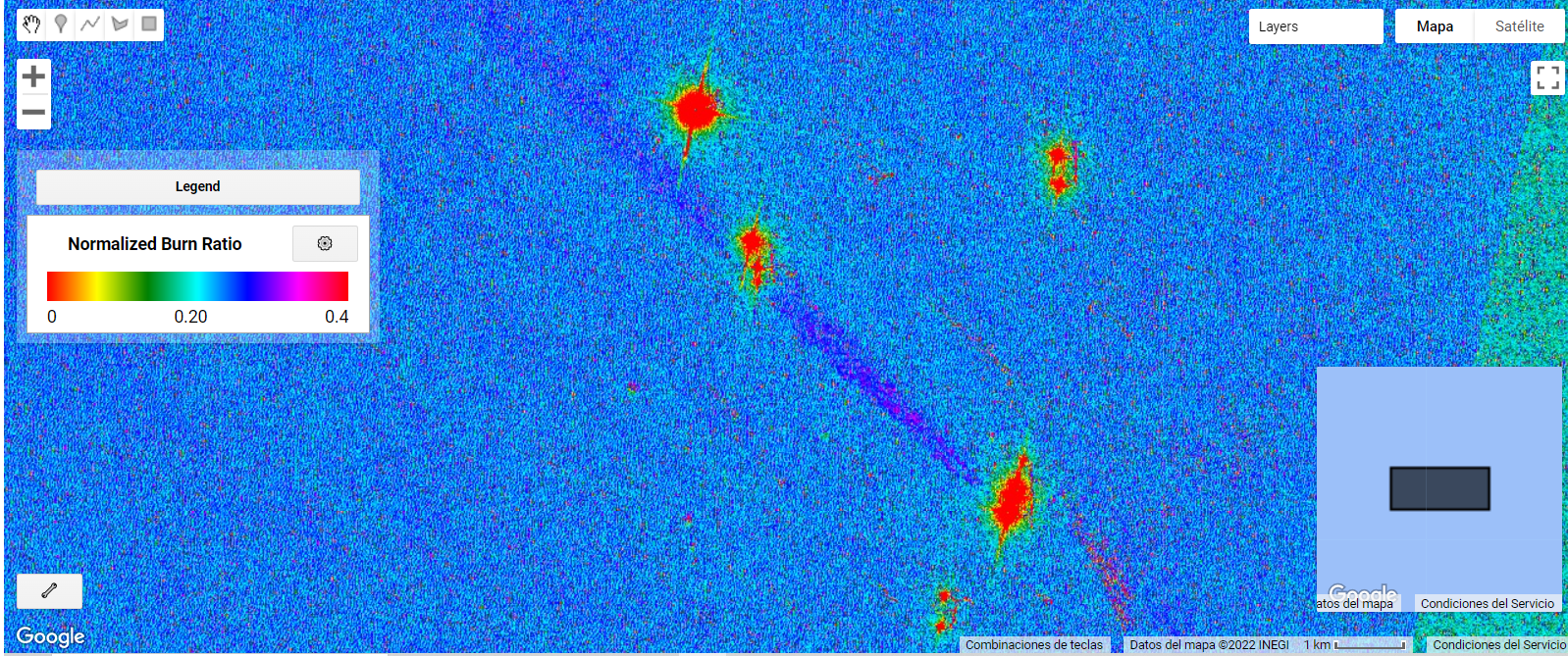
El siguiente ejemplo muestra cómo se resaltan las plataformas petroleras de la Sonda de Campeche mediante el índice de área quemada NBR.
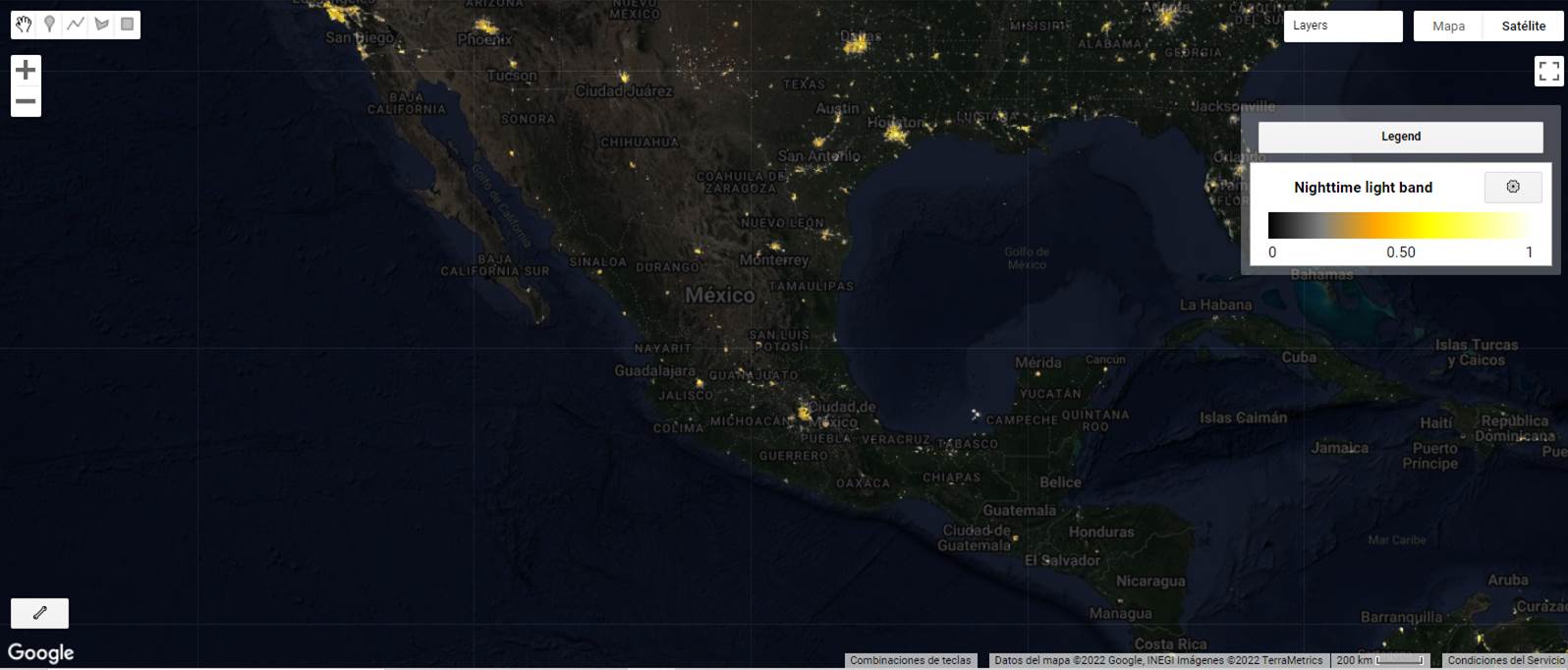
Los siguientes mapas ilustran el uso de la semitransparencia para visualizar el índice sobre el mapa base o el compuesto.
El primero muestra la distribución de luces nocturnas observadas mediante el sensor VIIRS.
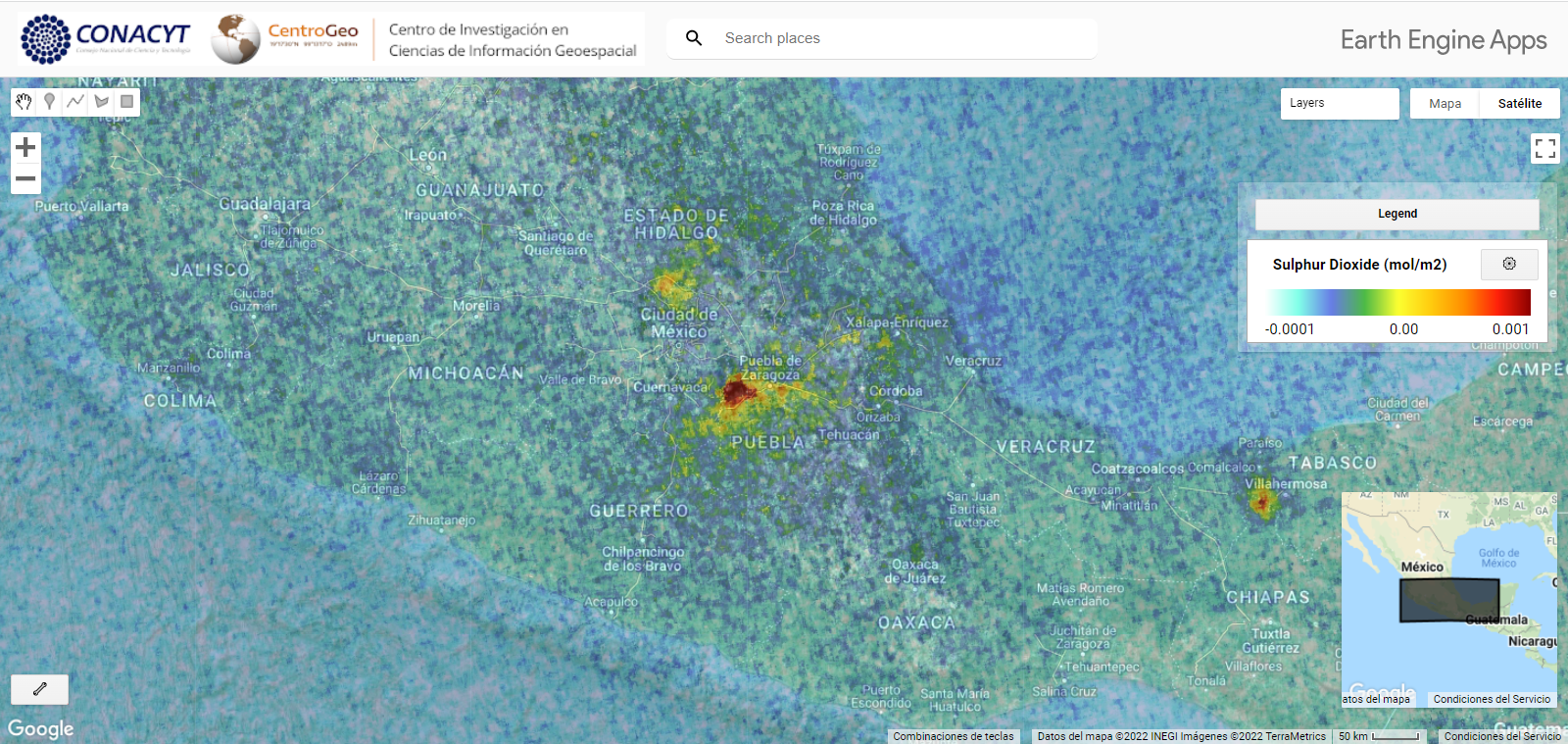
El siguiente mapa muestra la distribución de contaminantes medidos con TROPOMI. TROPOMI (TROPOspheric Monitoring Instrument) es un sensor abordo del satélite Sentinel 5 Precursor (S5P) de la Agencia Espacial Europea diseñado para registrar la composición de la atmósfera a una resolución aproximada de 3.5km x 5.5km por pixel. Este mapa muestra la distribución de dióxido de azufre registrado por el S5P en la región central del país en abril del 2019, cuando numerosos incendios azotaron el Estado de México, Ciudad de México, Puebla y Michoacán.
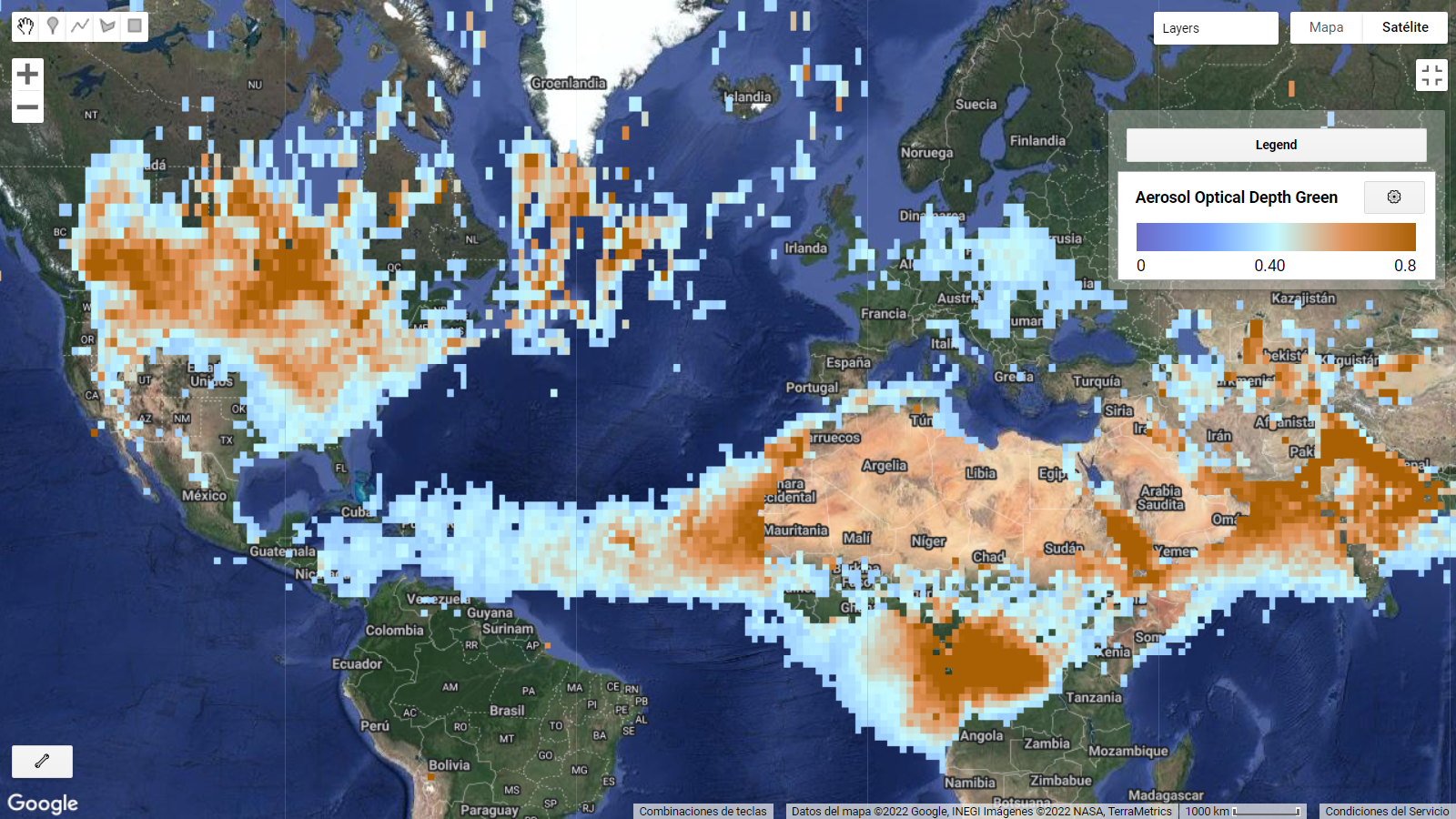
Los umbrales (Index Operations/Apply threshold mask) son útiles para detectar valores del índice por encima o por debajo de un valor de referencia. Los siguientes mapas ilustran el uso de un umbral para detectar zonas de interés.
En este mapa se muestra el espesor óptico por encima de 0.3 de aerosoles con partículas del orden de los 0.47 micrones (banda verde) captada por el sensor MODIS Terra & Aqua (pixel de 1 grado) en julio del 2021 donde se aprecia la nube de polvo que vuela desde el desierto del Sahara hacia el Caribe en el continente Americano.
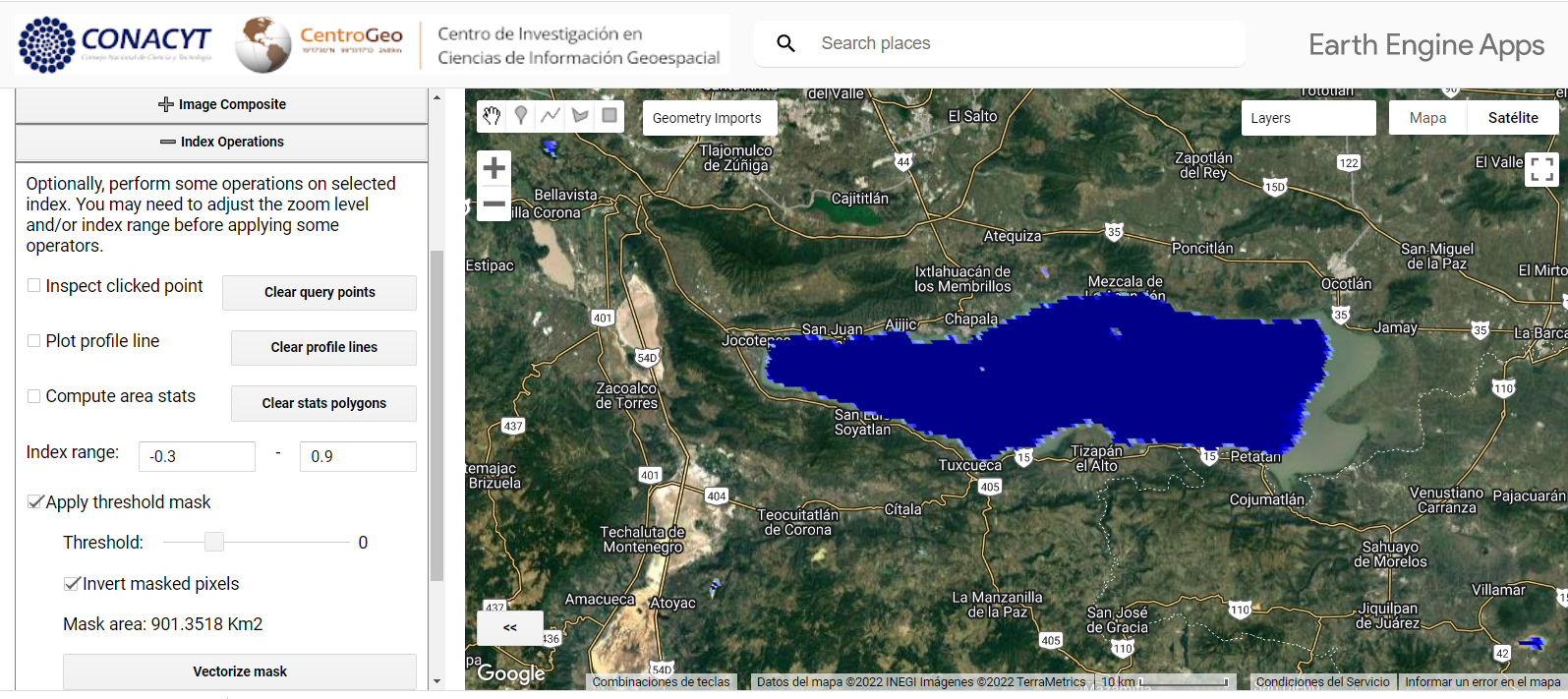
Los cuerpos de agua son fácilmente detectados con sensores ópticos usando el NDVI, ya que éste presenta valores negativos sobre los cuerpos de agua. El siguiente mapa muestra la detección del Lago de Chapala empleando el NDVI con MODIS SR. Note que la opción Invert mask pixels está activa para considerar los valores por debajo del valor de umbral. Use Vectorize mask para convertir la máscara en polígonos, la cual puede ser descargada desde Download data/Geometry layers (KML).
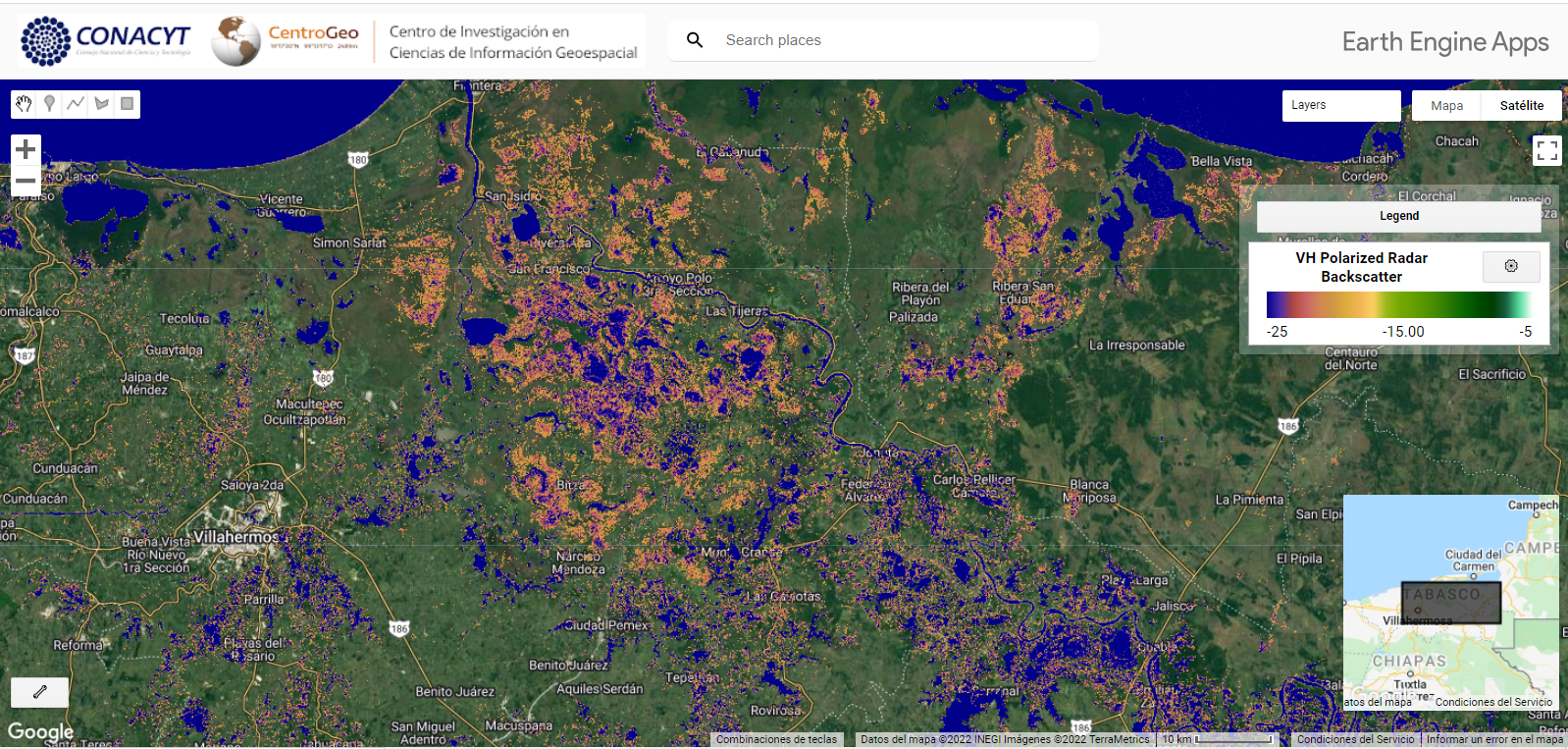
La humedad de suelo también se puede detectar con RADAR, por lo que suelen ser empleados en el estudio de los humedales. El Convenio Ramsar define un humedal como la "zona de la superficie terrestre que está temporal o permanentemente inundada, regulada por factores climáticos y en constante interrelación con los seres vivos que la habitan". Además de ser hábitat de numerosas especies, los humedales cumplen la función de filtros naturales del agua mediante la vegetación hidrófila que se desarrolla en estos ecosistemas. En este mapa se empleó la retrodispersión VH de Sentinel 1 de noviembre del 2020 para detectar las áreas húmedas e inundadas de los humedales de la cuenca del río Usumacinta.
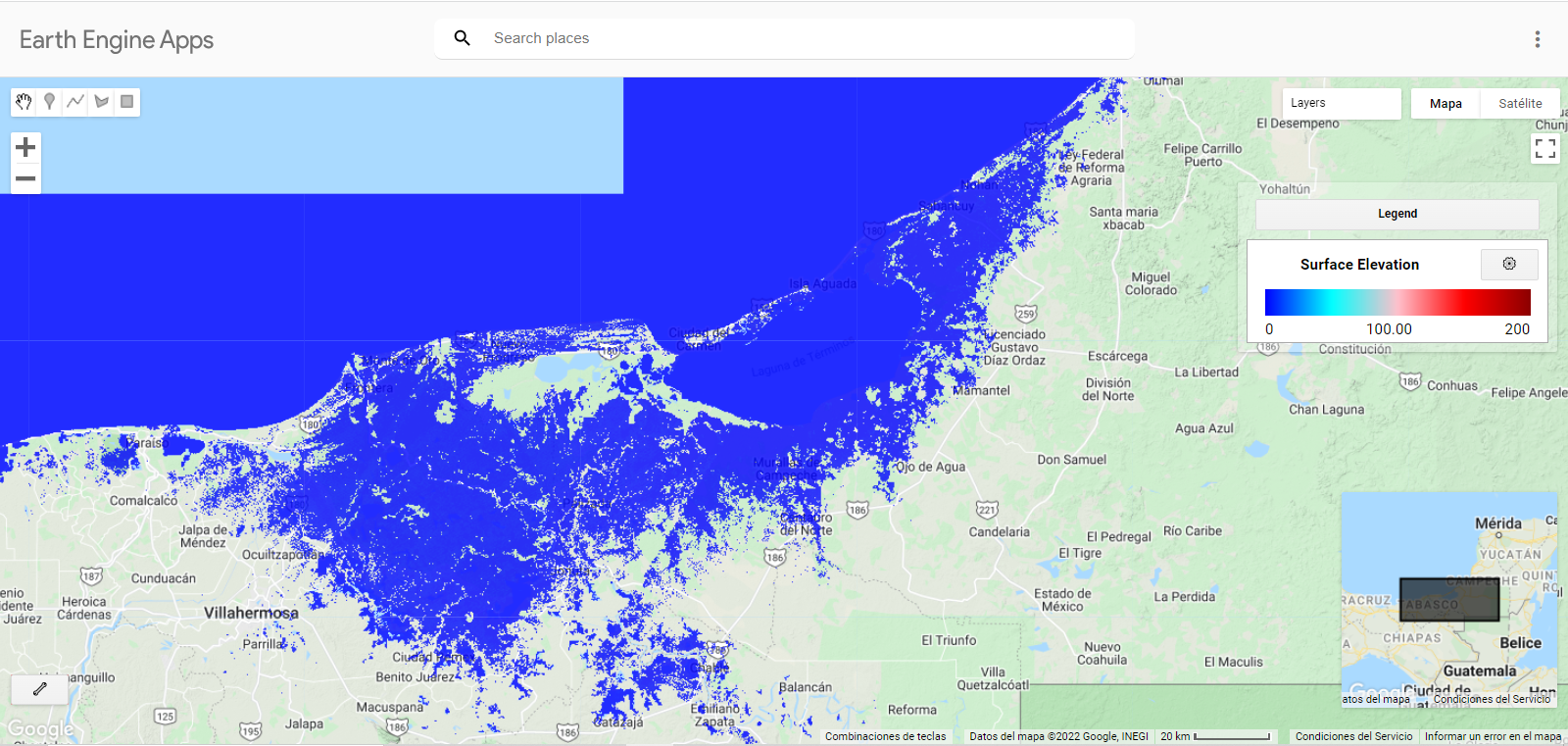
El GSIM no solo mapea índices espectrales, ya que también cuenta con algunas imágenes de elevación del terreno generadas por interferometría de radar. Este ejemplo emplea los datos de elevación SRTM (Shuttle Radar Topography Mission, 2000) para mostrar lo que le pasaría a la isla Ciudad del Carmen, Campeche si el nivel del mar aumentara 3m.
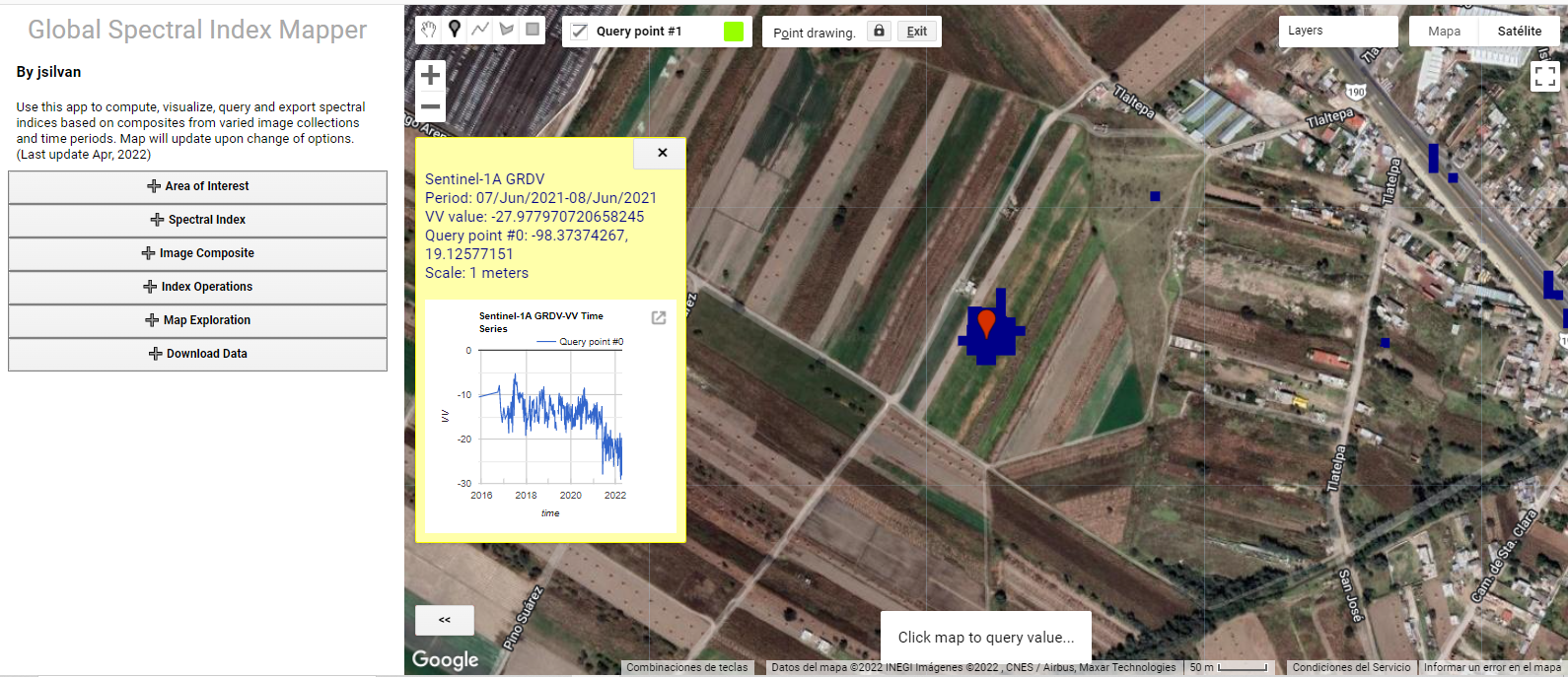
GSIM permite generar algunas gráficas de consultas puntuales, lineales y de área, los cuales se pueden exportar como CSV o como imagen. Las siguientes figuras, muestran ejemplos del uso de gráficas de series de tiempo para determinar el momento cuando ocurrió un evento o para determinar una tendencia.
El siguiente mapa muestra cómo se detecta el socavón en Santa María Zacatepec, Puebla, México empleando imágenes de radar Sentinel-1A del 7 de junio del 2021. La serie temporal de la polarización VV da cuenta de la acumulación de agua como una caída abrupta. (Nota: Use la flecha de la esquina superior derecha de la gráfica para abrirla en otra pestaña desde donde la puede exportar).
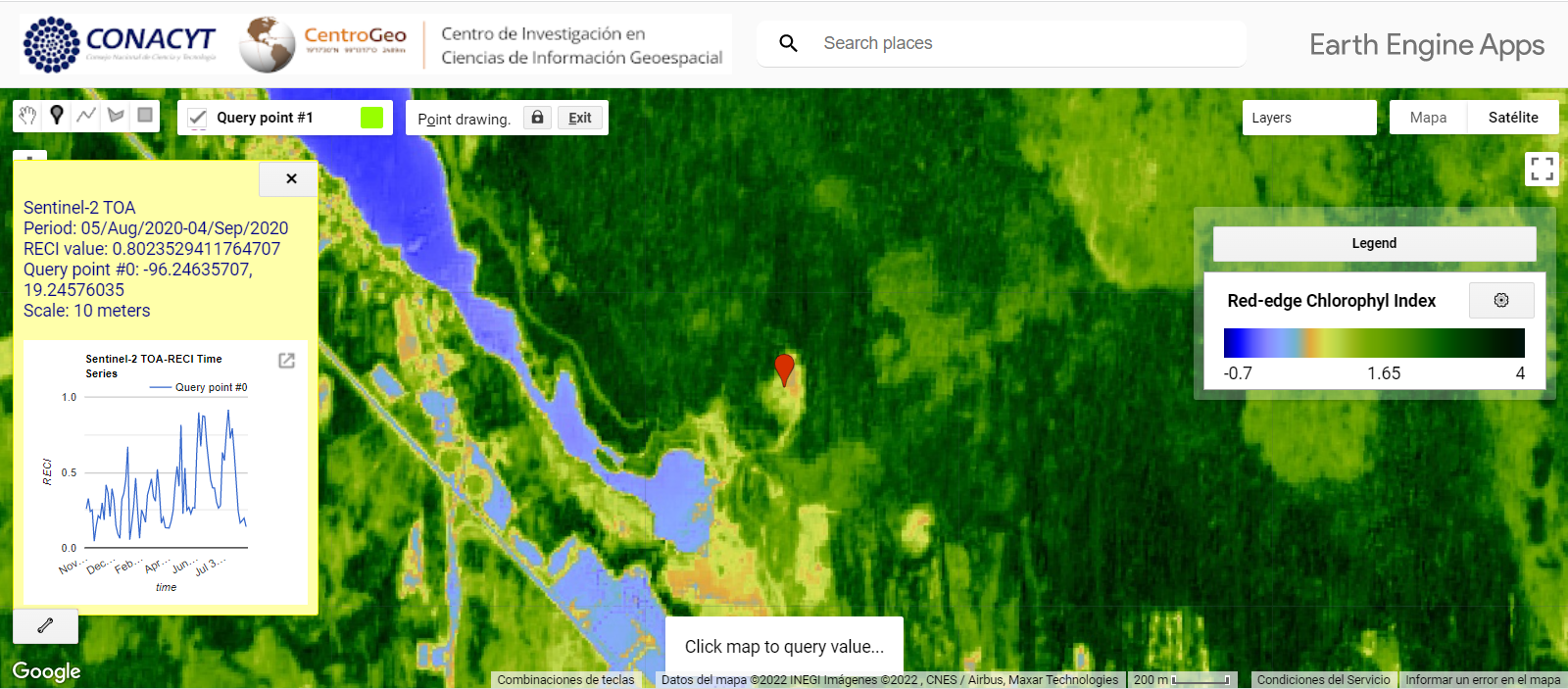
Estudios recientes han puesto de manifiesto que la descomposición de los cuerpos enterrados ocasiona un incremento en la concentración de Nitrógeno en la vegetación circundante, ya que éste es usado por las plantas para generar la clorofila en las hojas. Por su parte la clorofila es un pigmento que puede ser detectado con algunos índices espectrales, como el RECI (Red Edge Chloropyll Index). El siguiente mapa muestra la distribución del RECI calculado con Sentinel-2 TOA para el sitio donde en 2016 se descubriera una de las fosas más grandes del país en Colinas de Santa Fe, Veracruz. La serie de tiempo indica una tendencia general positiva lo que confirmaría el enriquecimiento de Nitrógeno en el punto.
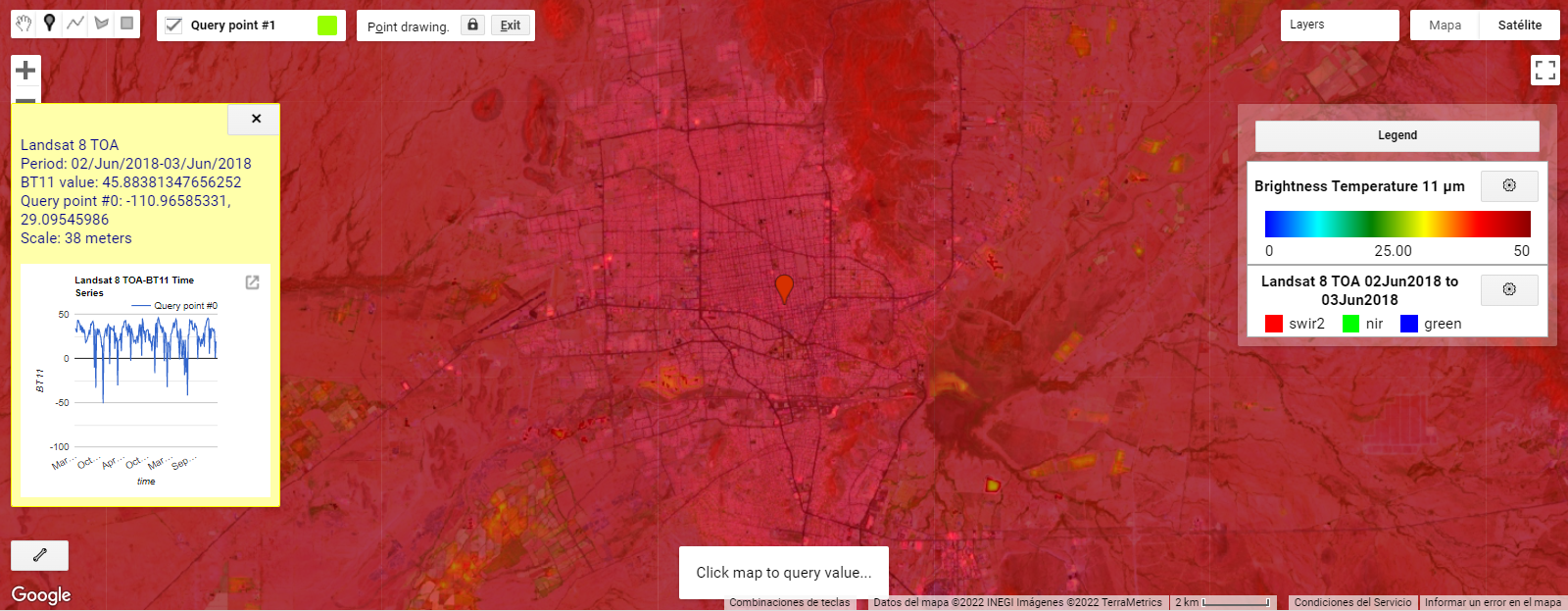
La temperatura de brillo de la superficie terrestre es el valor de temperatura si asumimos que ésta se comporta como un cuerpo negro o emisor perfecto, el cual por definición, emite todo lo que absorbe (emisividad = 1). En general, la temperatura superficial no es igual que la temperatura de brillo debido a que diferentes materiales tienen diferente emisividad. En este mapa se muestra la distribución de la temperatura de brillo que midió Landsat 8 en la banda de los 11 micrómetros de longitud de onda sobre Hermosillo, Sonora el 2 de junio de 2018. La gráfica muestra la serie de tiempo en el punto marcado, indicando un incremento en el valor máximo de poco más de un grado, desde el inicio de operación de Landsat 8 en 2013 hasta el presente.
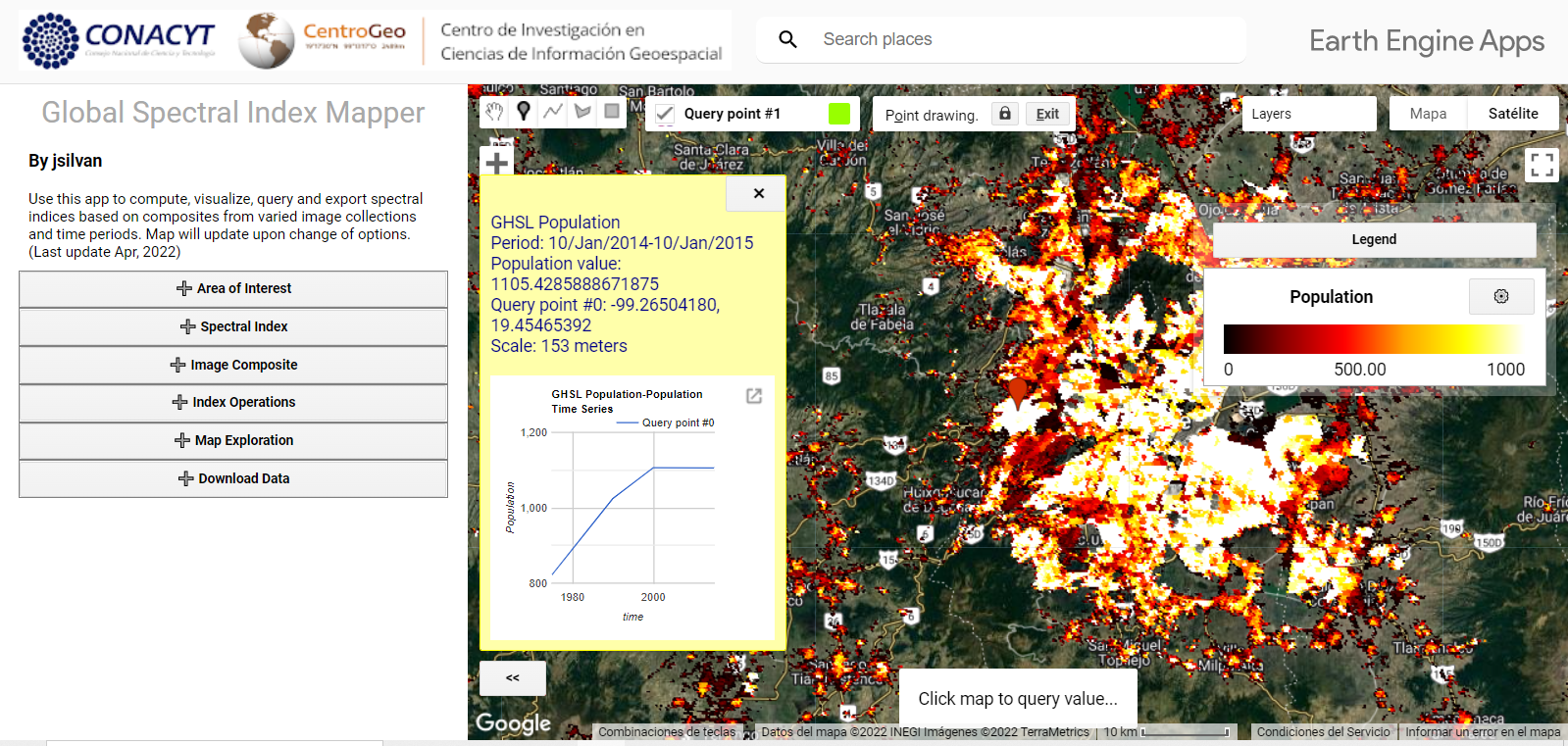
Los satélites no pueden censar la población directamente, pero empleando tecnologías de minería de datos espaciales que permiten procesar, analizar y extraer conocimiento a partir de una gran cantidad de datos heterogéneos, como datos de imágenes satelitales globales, datos de censos y otras fuentes de información, es que se ha logrado generar imágenes de la distribución de población a nivel global. Un ejemplo es el conjunto GHSL (Global Human Settlement Layers) que contiene la población de 1975-1990-2000-2015 para cada kilómetro cuadrado de la tierra. Este mapa muestra los datos del GHSL de 2015 en la ZMVM, con la gráfica de la evolución de la población en el punto marcado.
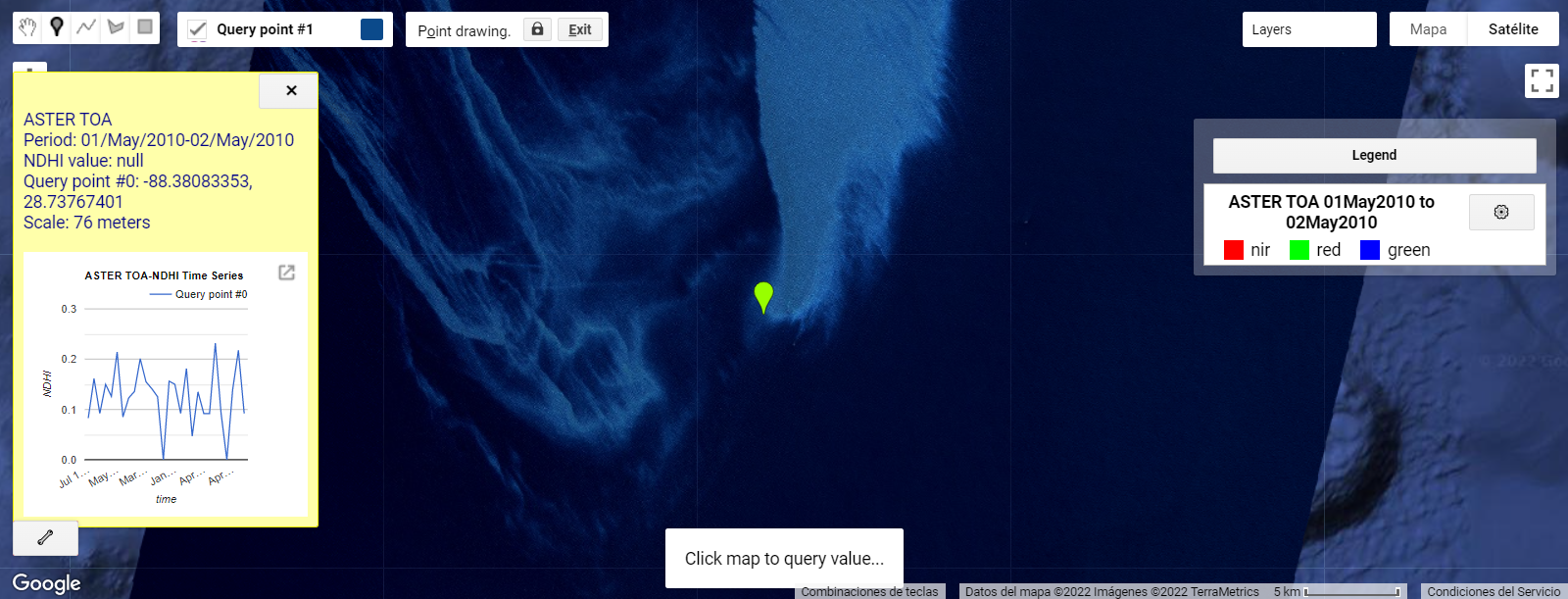
El siguiente mapa muestra la composición Color-Infrarrojo de una imagen ASTER tomada el 1-Mayo-2010 en el punto de la explosión de DeepWater Horizon ocurrida el 20 de abril del 2010 ubicado en las coordenadas 28°44′12″N 88°23′14″O. Desafortunadamente, la serie temporal no cubre el período ya que a partir de 2008, los sensores del infrarrojo de onda corta presentaron fallas.
Además de las series temporales, se puede consultar la firma espectral del compuesto, esto es los valores de las bandas en el punto seleccionado. El siguiente ejemplo muestra el compuesto de MODIS SR con la opción Index Operations/Inpect clicked point/Include spectral signature chart habilitada. Al hacer click en el mapa, la gráfica de la firma espectral se incluirá en el panel de consulta. Prueba haciendo click en puntos con distintas coberturas para generar firmas como las que se incluyen abajo (Nota: cuando una geometría compatible está seleccionada y se habilita una herramienta de consulta, ésta es empleada para realizar la primera consulta).
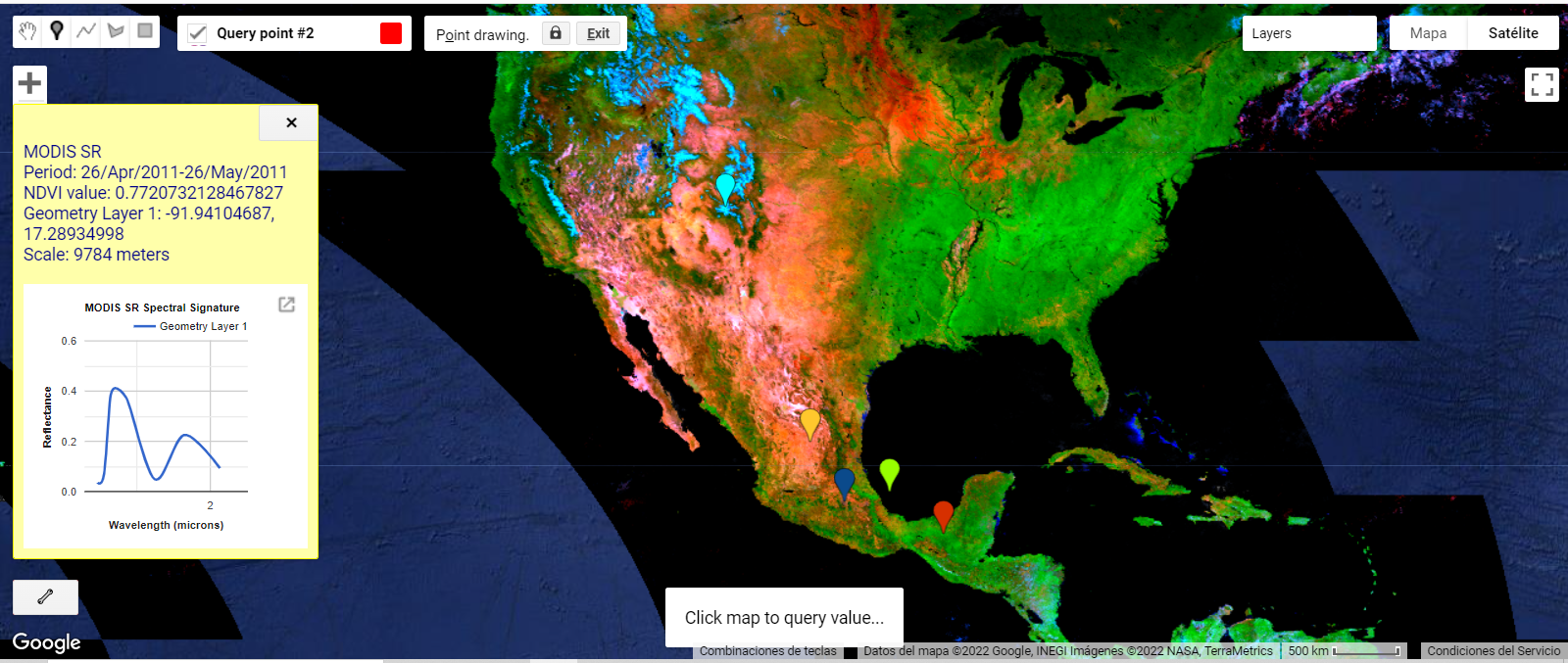
v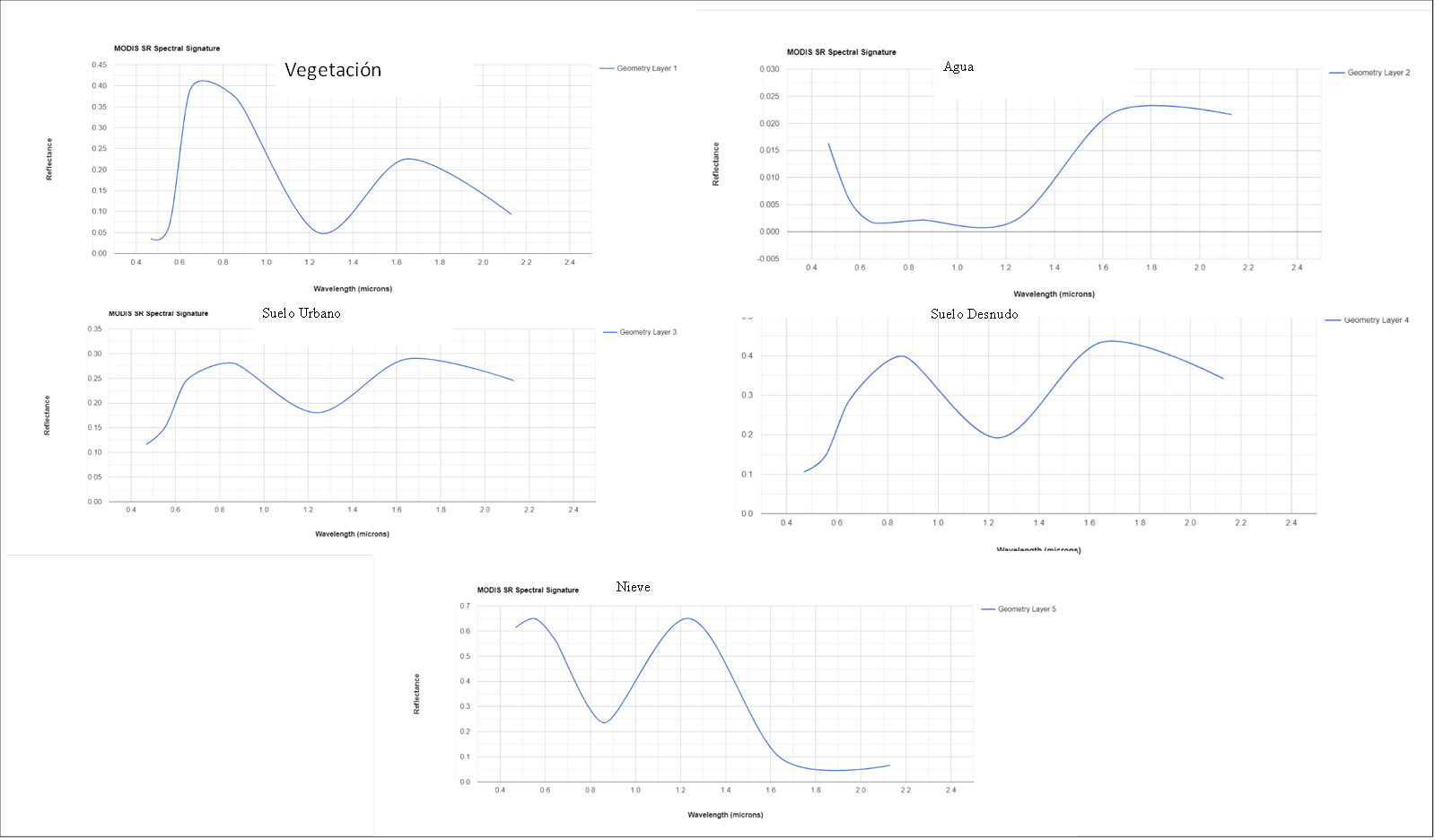
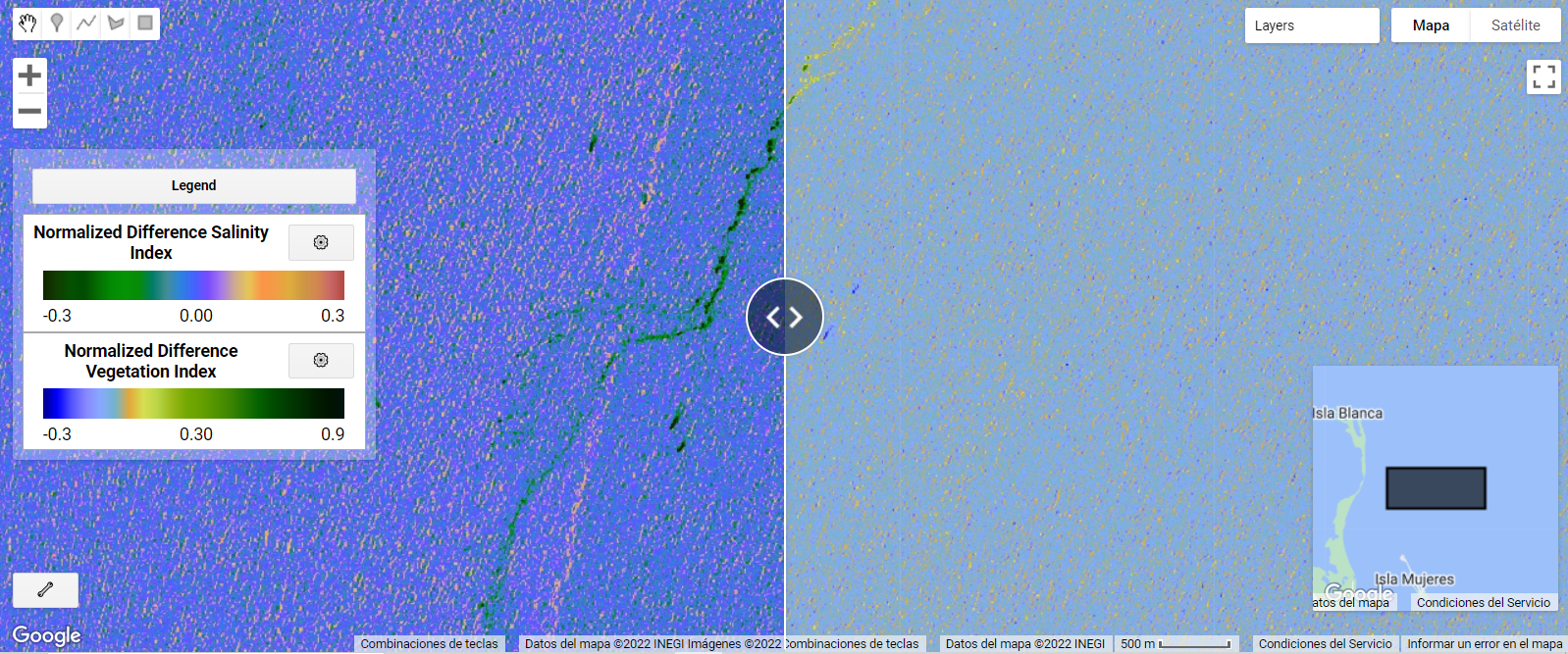
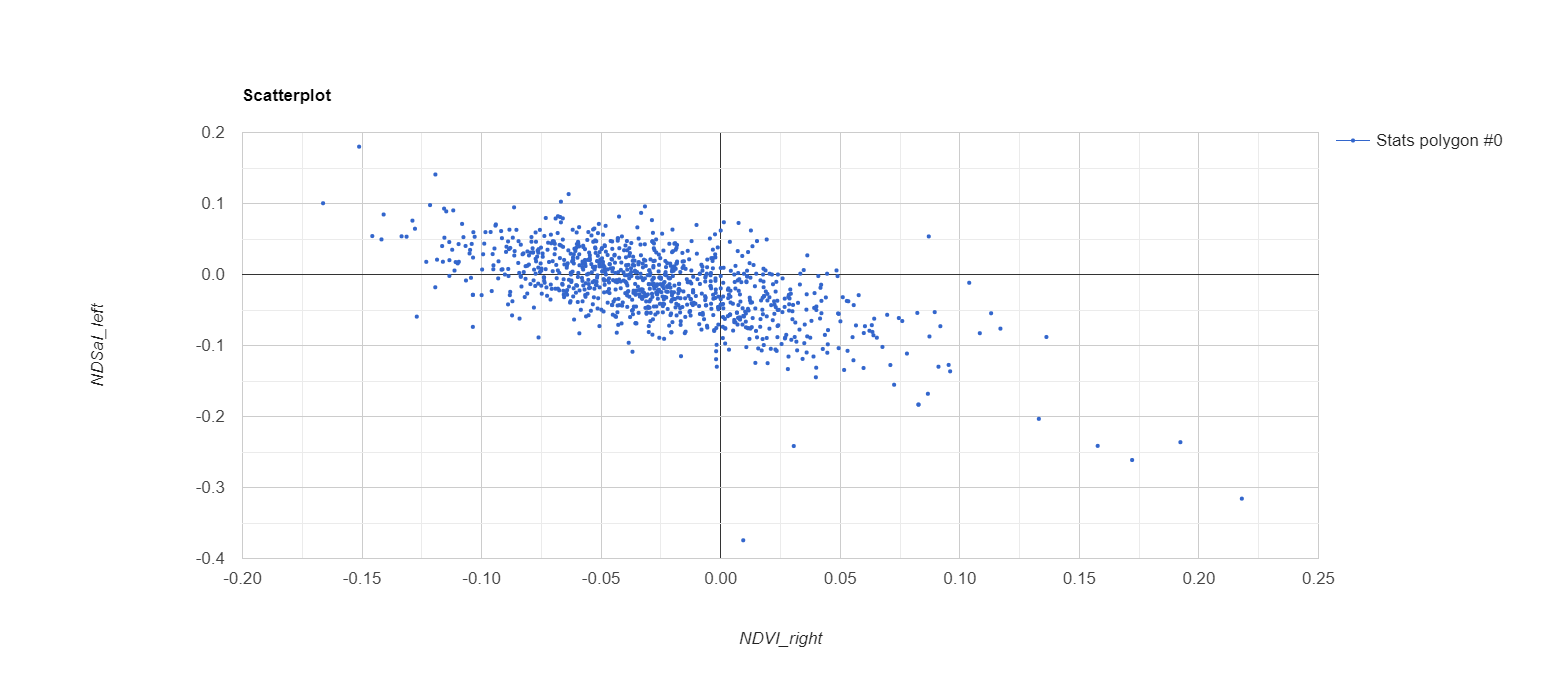
Al activar la vista de dos paneles (Map Appearance/Duplicate map), se tiene la posibilidad de comparar dos índices (Index Operations/Apply binary operation). El siguiente mapa compara el índice de vegetación (NDVI) y el índice de salinidad (NDSal) durante el arribazón de sargazo en el caribe mexicano, en ambos se observaba la franja de sargazo avanzando hacia la costa. Tanto el sargazo como los navíos muestran baja salinidad, pero sólo sargazo muestra un valor mayor de NDVI. Use la herramienta de diagrama de dispersión (Index Operations/Compute área stats/Include scatterplot) para generar un scatterplot como el mostrado abajo (Nota: todas las operaciones de consulta y opciones seleccionadas se hacen en mapa del panel izquierdo, que es el panel principal. Si desea aplicar alguna operación al panel derecho debe intercambiarlos haciendo click en Map appearence/Swap map layers).
Una aplicación típica de los dos paneles es la comparación de un mismo índice en dos momentos diferentes para detectar cambios de interés. Por ejemplo, la termografía diferencial es una técnica para descubrir oquedades en el subsuelo mediante la diferencia de temperatura antes de la salida del sol y por la tarde. En el siguiente mapa se muestra la diferencia normalizada (panel izq.) entre la temperatura de día el 18-May-2021 (ASTER TOA DT) y la temperatura de noche el 20-May-2021 (ASTER TOA NT), solo un par de semanas antes de que ocurriera el colapso Santa María Zacatepec, Puebla, México. Los tonos azules indican que el suelo se calentó muy poco y los tonos en rojo indican que se calentó mucho respecto a la noche. Los primero, por lo tanto podrían estar relacionados con oquedades o cuerpos de agua subterráneos. El marcador indica el punto exacto del colapso. (Nota: el resultado de los operadores binarios reemplaza el índice del panel izquierdo, mientras que el panel derecho queda intacto. Al desactivar el operador binario se recupera el índice del panel izquierdo).

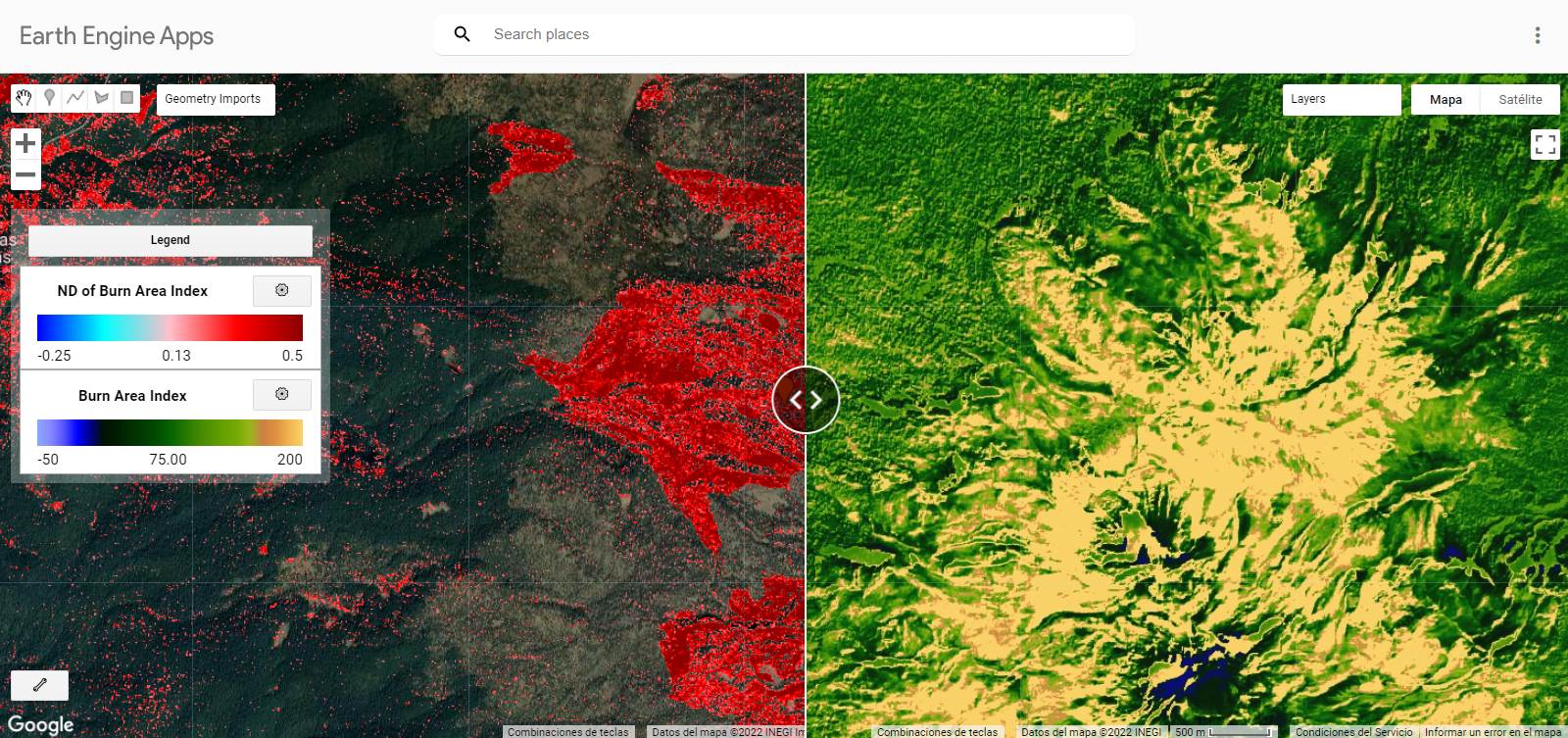
Este otro ejemplo ilustra el empleo del índice de área quemada (BAI - Burn Area Index) para estimar el área quemada en Iztaccíhuatl tras un incendio ocurrido en febrero de 2021. El panel derecho muestra el BAI antes del incendio y el izquierdo, el BAI después del incendio, pero normalizado respecto al derecho y con un umbral de 0.3 para detectar el área quemada. Para consultar el área de la máscara en km2 ve a la sección Index Operations/Apply threhosld mask. Al ajustar el área visible del mapa se actualizará el valor del área.
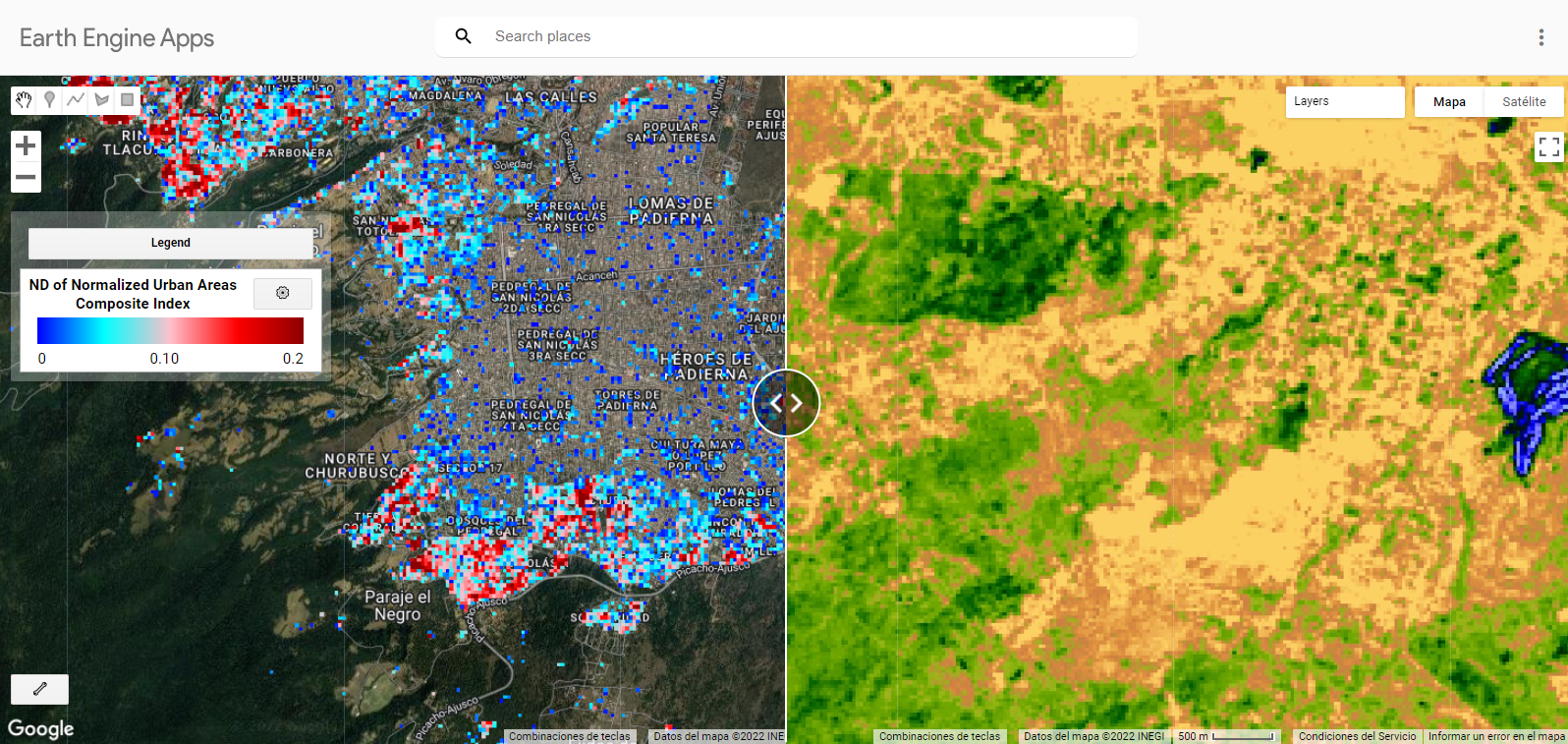
En el siguiente mapa ilustra la detección del crecimiento de la mancha urbana. El panel derecho muestra el NUACI (Normalized Urban Areas Composite Index) para el año 1985 con Landsat-5 y el panel izquierdo muestra la diferencia normalizada del NUACI en 2020 con Landsat-8 (realtivo al de 1985). Se aplicó un umbral para mostrar valores positivos que indican un crecimiento relativo en el valor del índice. Note que la mayor parte del crecimiento se localiza en las periferias, notablemente al sur de la ciudad hacia el suelo de conservación.
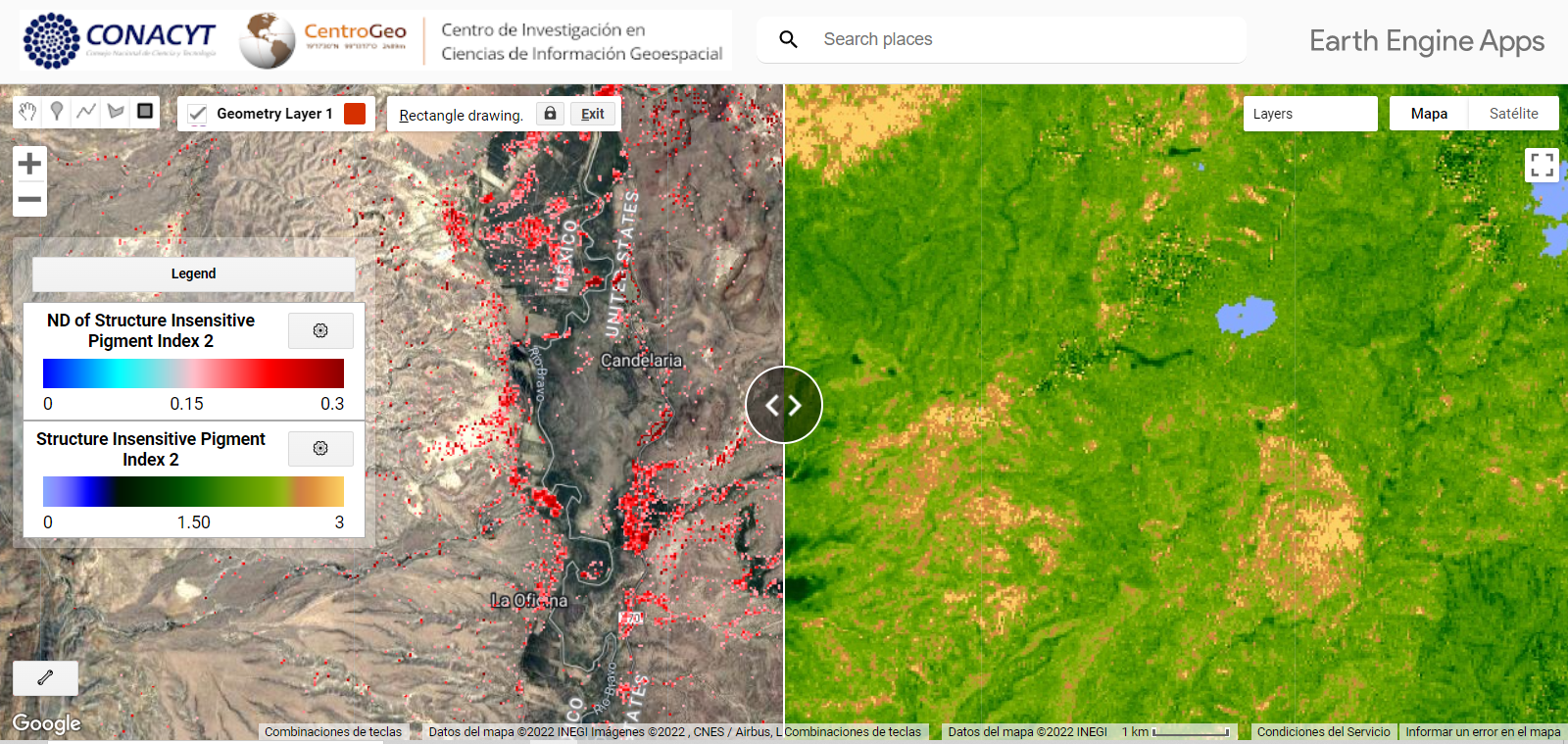
En el siguiente ejemplo se muestra la detección la especie exótica Tamarix. El Tamarix es un género arbustivo importado desde Asia y otras regiones de Europa hacia Norteamérica desde principios del siglo XIX. Por sus raíces profundas y resistencia a la salinidad, el Departamento de Agricultura de los Estados Unidos (USDA) lo plantó en las orillas de los ríos de zonas semiáridas como un método de estabilización del canal, pero con los años la especie original se hibridó y comenzó a desplazar las especies nativas y, sin un depredador natural, se convirtió en una maleza indeseable que disecaba los ríos, a través de los cuales se dispersó hacia nuestro país. El siguiente mapa usa la diferencia normalizada del SIPI2 para detectar la distribución de Tamarix en el Rio Bravo, cerca del pueblo fronterizo Candelaria, Texas. La clave de la detección se basa en la comparación del índice en primavera (panel derecho) cuando las hojas son verdes y en otoño (panel izquierdo), cuando su color se torna café, lo cual no ocurre con las especies nativas.
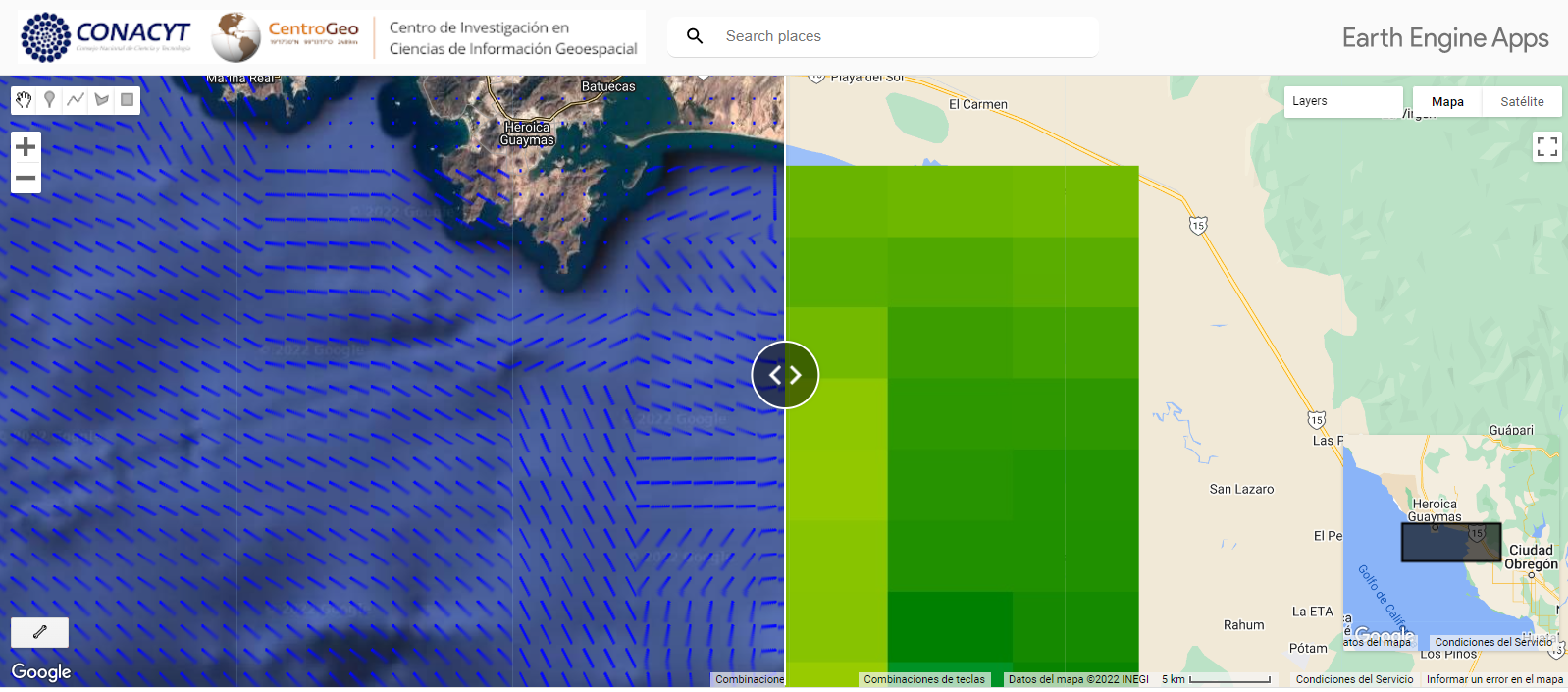
En el siguiente mapa se aplica el operador binario Flow para visualizar las componentes de velocidad X y Y de la superficie marina contenidas en el conjunto de datos HYCOM. El operador Flow hace un muestreo a la escala del mapa por lo que su apariencia depende del nivel de acercamiento cuando se selecciona la opción. Para probarlo, deshabilítalo y has un alejamiento del mapa y luego actívalo nuevamente. (Nota: este operador usa iteraciones por lo que es computacionalmente demandante y el mapa puede tardar en generarse).
Las operaciones espaciales (Index Operations/Apply spatial operator) se aplican sobre el índice seleccionado e incluyen operaciones de textura basadas en la matriz de co-ocurrencia, filtros espaciales y operaciones hidrológicas. Los operadores espaciales se calculan a la escala del mapa, por lo que el usuario debe ajustar primero la escala del mapa y posteriormente aplicar el operador espacial.
La matriz de Co-ocurrencia es una distribución bi-variada que cuantifica la frecuencia con la que un pixel central y un pixel vecino presentan valores conjuntos. Se emplea para calcular descriptores de texturas, los cuales a su vez se usan en detección y clasificación de ciertos tipos de cobertura. En este mapa se empleó el operaor IDM (Inverse Distance Moment) sobre la banda pancromática de Landsat 8 para realzar los campos de cultivos de Sahuayo de Morelos (abril 2021). El IDM presenta valores altos en zonas homogéneas, por lo que es útil para delinear parcelas de cultivos (tonos rojos) separadas por caminos.

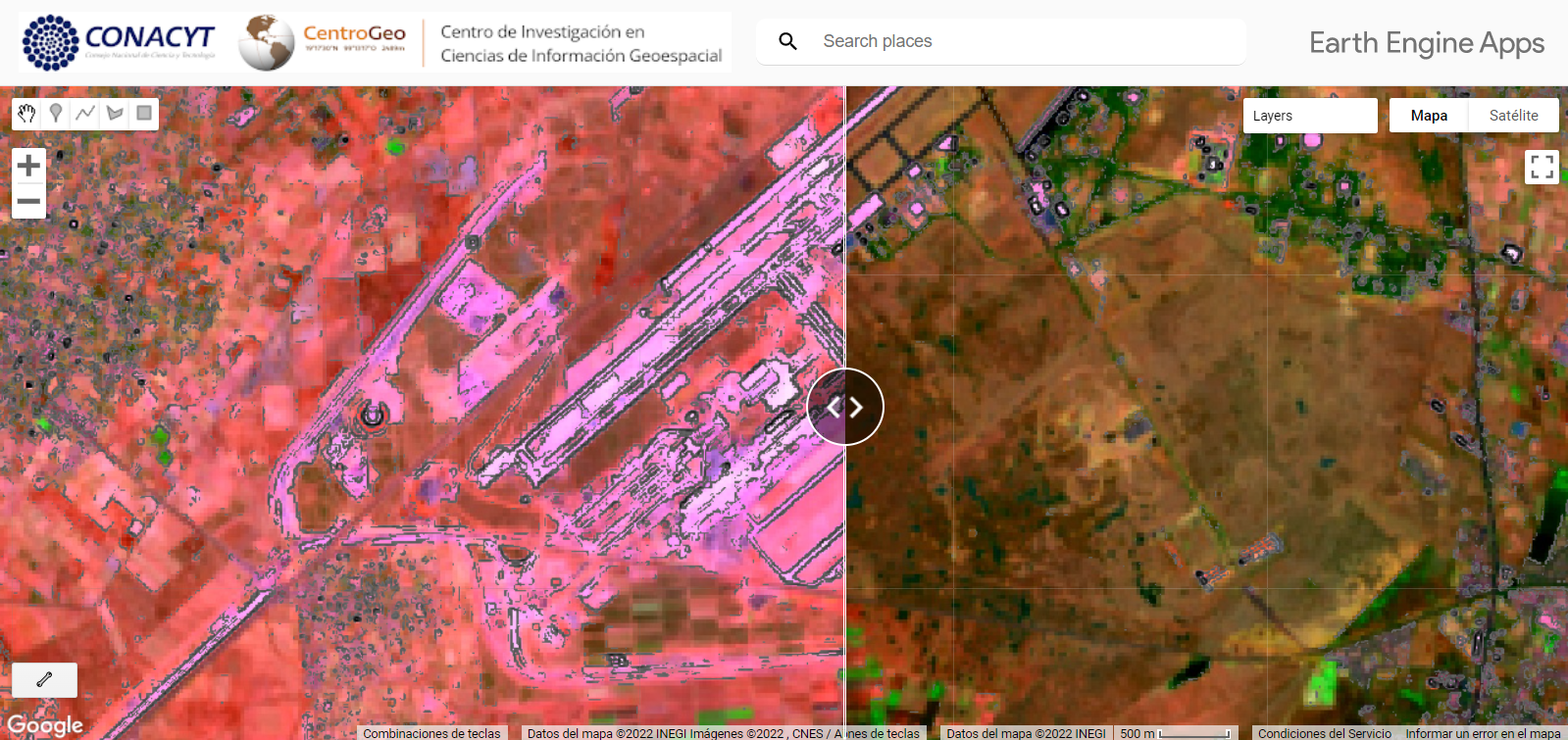
Además de la matriz de co-ocurrencia se cuenta con algunos operadores espaciales como el gradiente y el laplaciano. El siguiente mapa compara el área del aeropuerto de Santa Lucía entre marzo de 2018 y marzo de 2021 con imágenes de Landsat 8. Se sobrepone el gradiente (Grad) de la banda pancromática con enmascaramiento para realzar los bordes de la infraestructura antes y después de las obras. Desliza el divisor para comparar visualmente el antes y después de las obras (Nota: recuerda que los operadores espaciales, como el gradiente, se calculan a la resolución del mapa, no de la imagen, por lo que su apariencia es dependiente de la escala del mapa.)
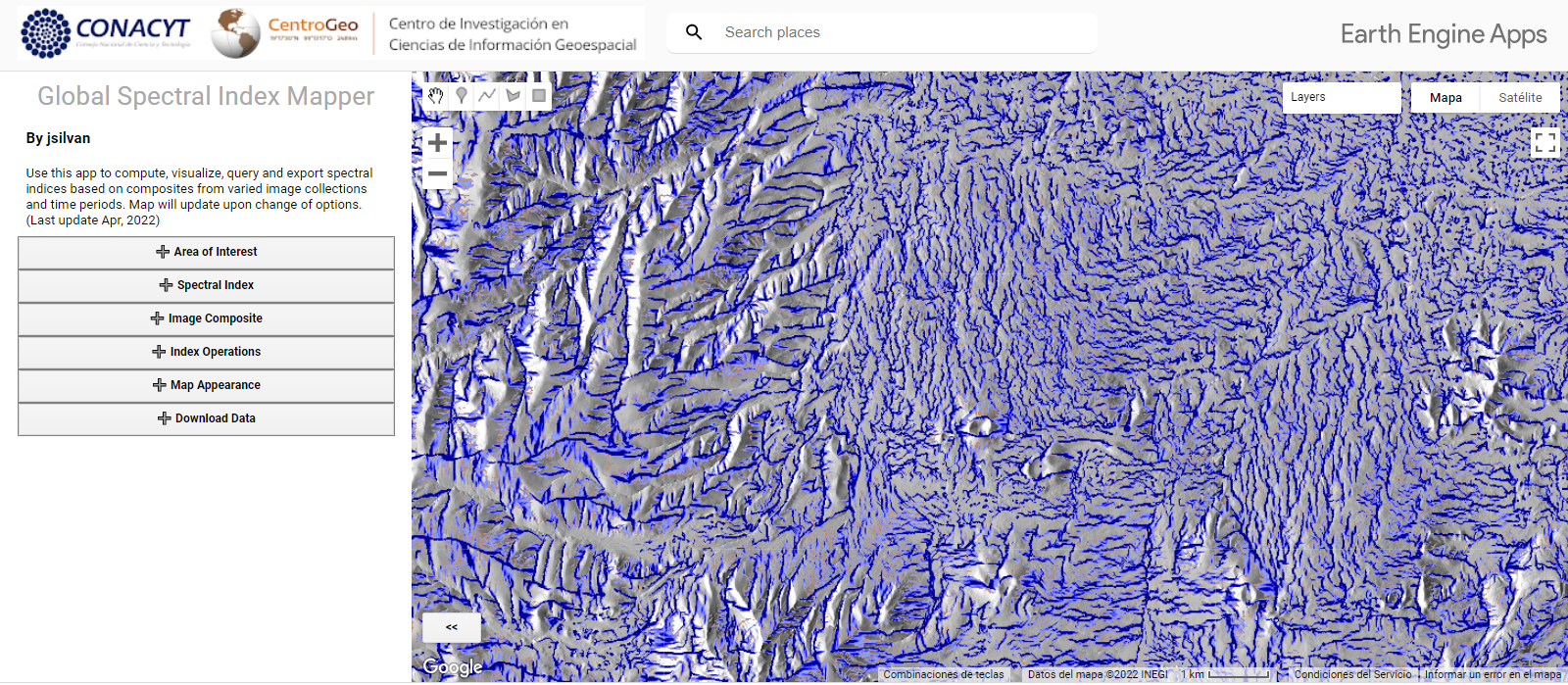
Los operadores hidrológicos son operaciones espaciales pensados para aplicarse sobre un modelo digital de terreno, aunque se pueden aplicar a cualquier índice previo reescalamiento de sus valores (en cuyo caso se usan los valores definidos en index range). El siguiente ejemplo muestra una implementación del método de direcciones infinitas para la acumulación de flujo (flowAcc2) sobre el modelo digital de terreno de datos LiDAR proporcionados por el INEGI.
GSIM permite cargar capas para la ubicación rápida de área de interés (Área of interest/Use a vector layer), pero además para realizar consulta de información.
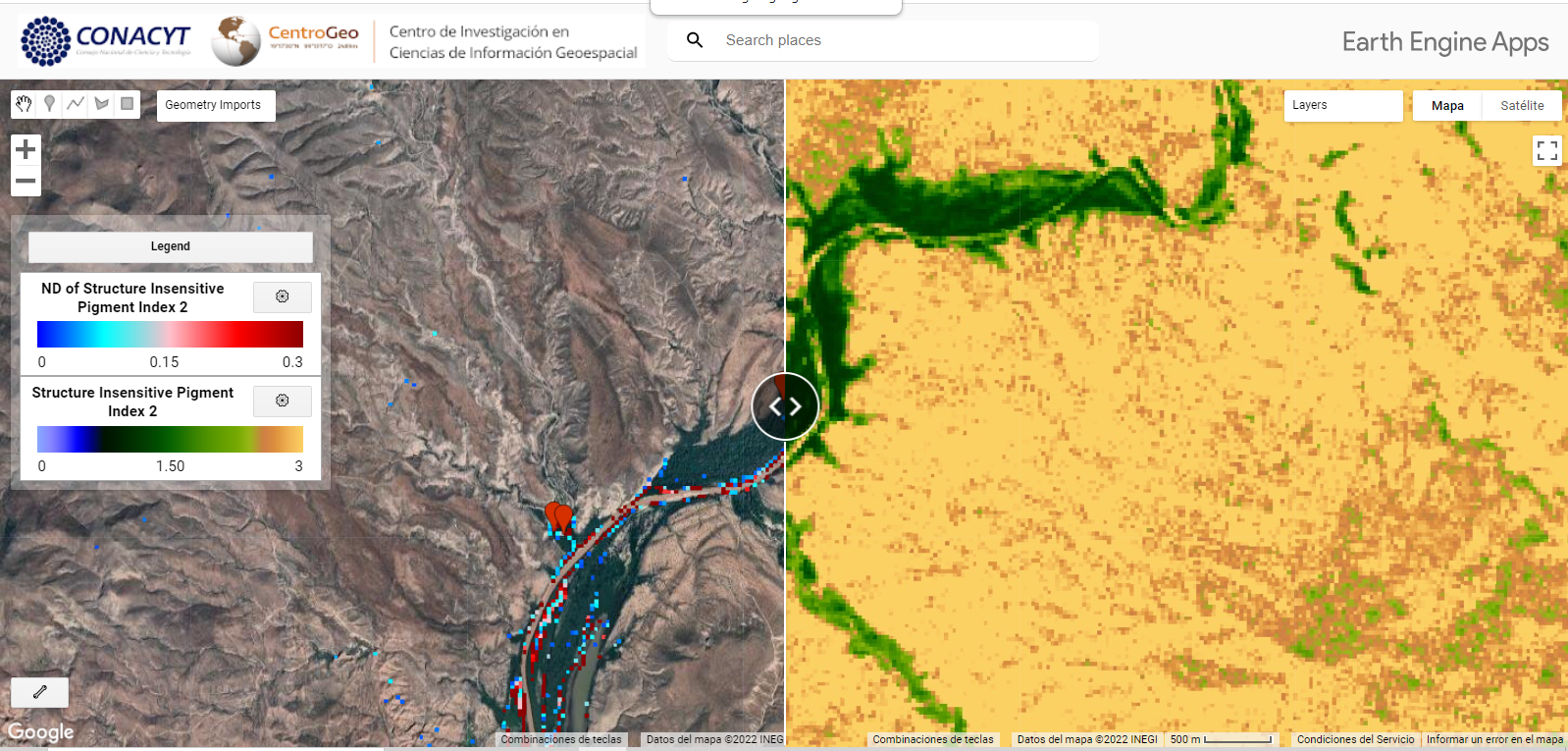
El siguiente mapa muestra una máscara de detección (panel izquierdo) de Tamarix en el río Bavíspe, Sonora. La detección se logra comparando el índice SIPI2 (Structure Insensitive Pigment Index 2) en dos momentos que capturan un cambio fenológico distintivo de la especie. Los puntos indican la ocurrencia confirmada por la CONABIO entre 2011-2012.
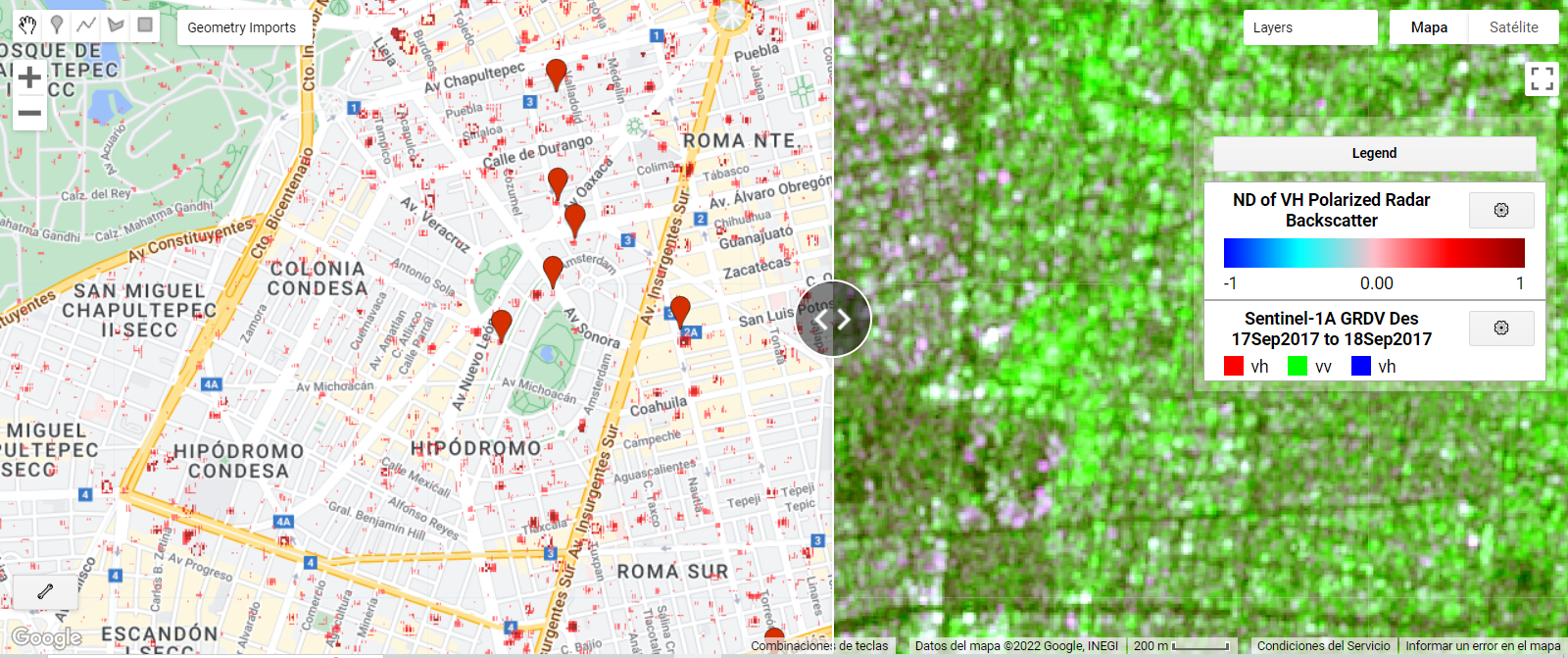
El siguiente mapa muestra puntos de derrumbe de edificios sobre una capa de diferencia normalizada de la Retrodispersión VH Sentinel-1 antes y después del temblor del 19 de Septiembre de 2017 en CDMX. Las áreas rojas muestran los cambios más pronunciados. Es razonable que muchos de los cambios no estén asociados a derrumbes de edificios, pero seguramente sí a la respuesta por la emergencia.
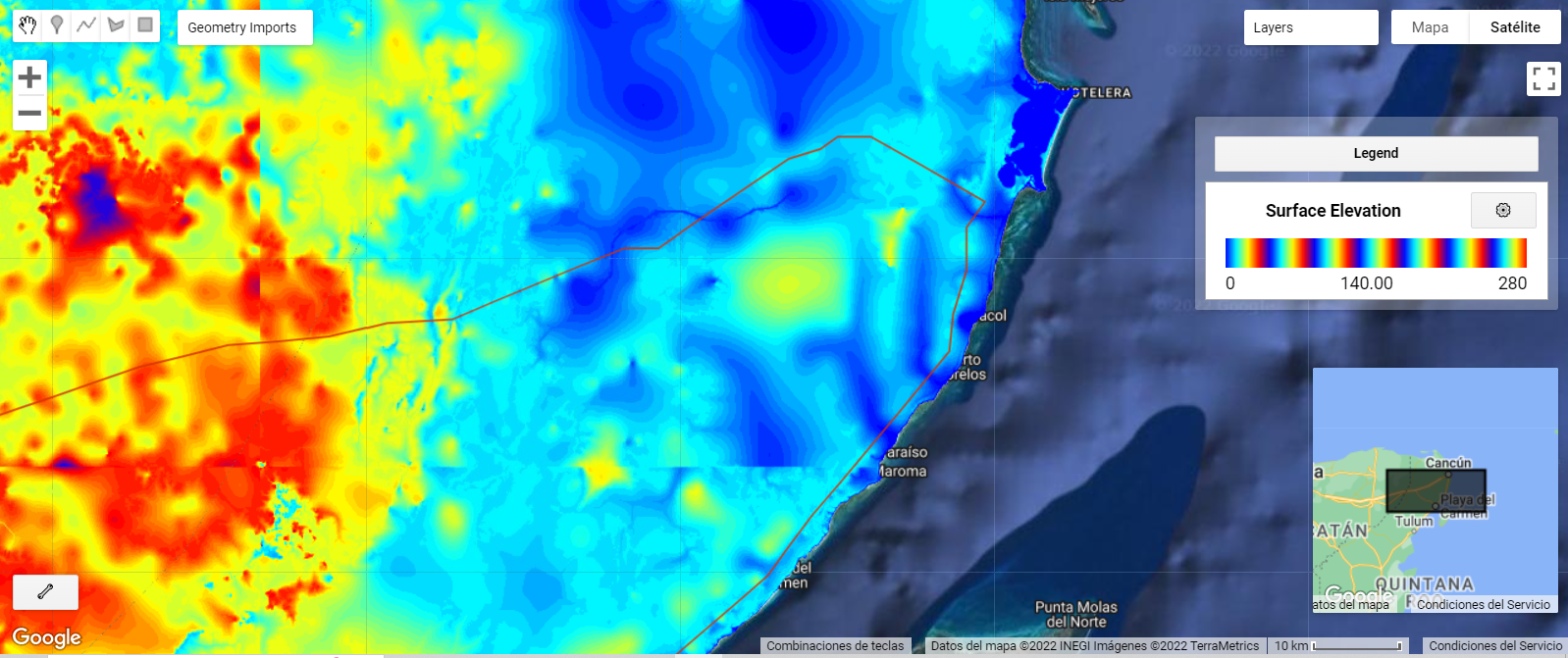
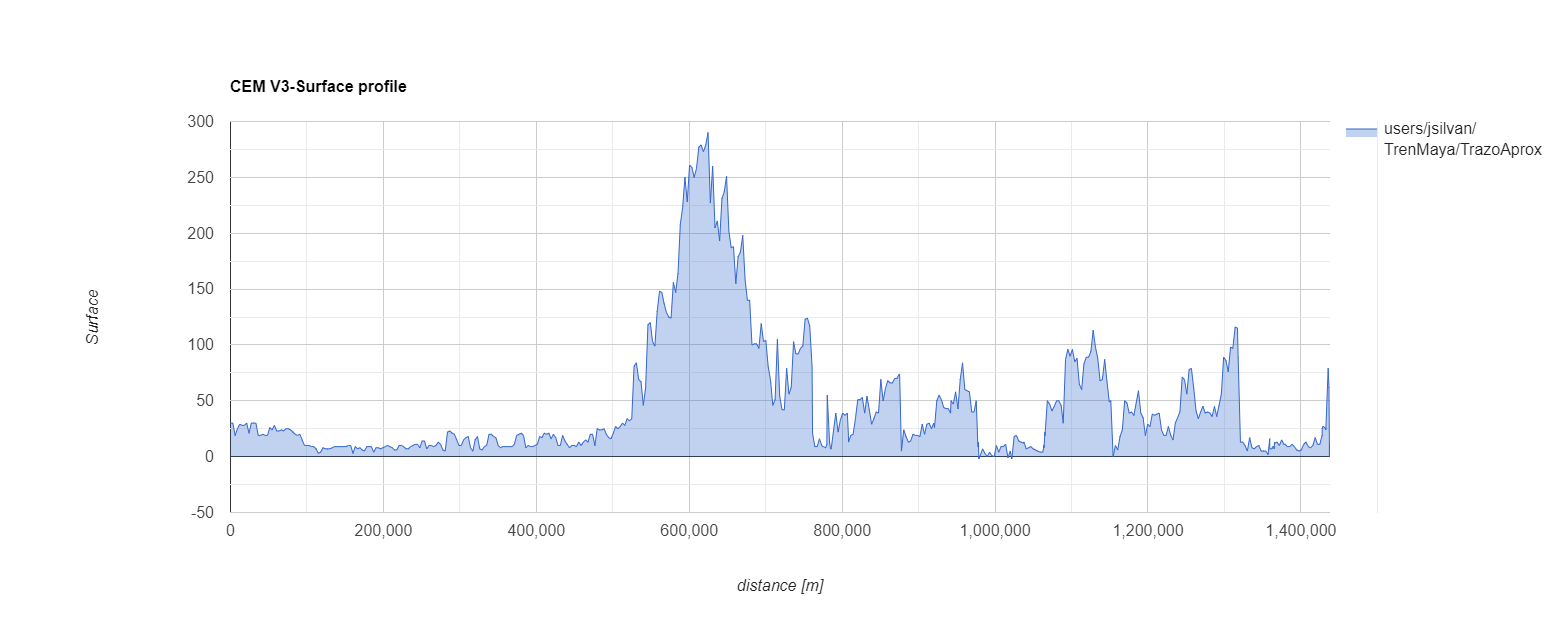
El siguiente ejemplo muestra el índice Surface basado en la colección llamada Continuo Mexicano de Elevaciones (CEM V3) a lo largo de un tramo del tren maya. Al cual se le aplicó una paleta de colores periódica para destacar los niveles de elevación. La línea muestra el trazo aproximado del tren maya. Seleccione la línea y active la herramienta de trazo de perfil (Index Operations/Plot profile line) para generar un perfil del terreno a todo lo largo del trazo, como el que se muestra abajo.
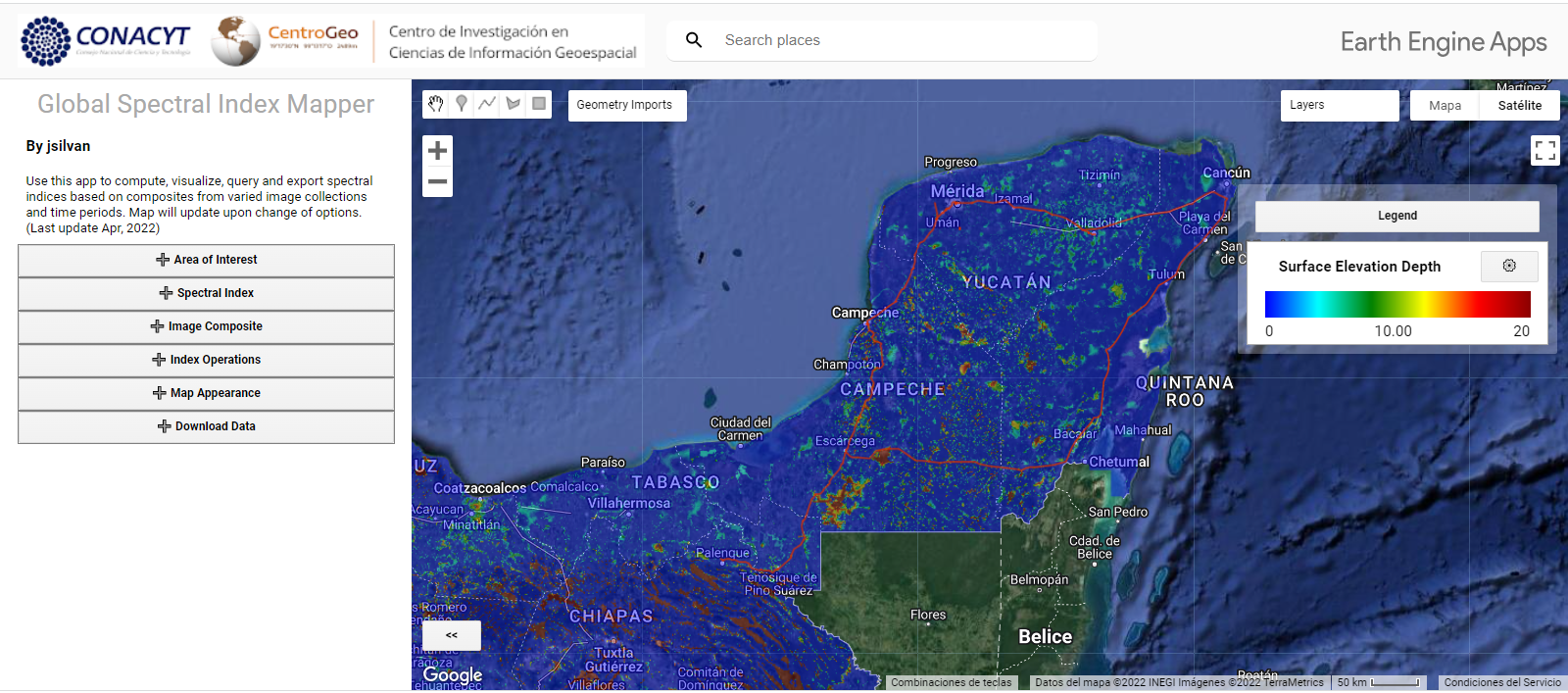
El siguiente mapa muestra la aplicación del operador espacial Depth (profundidad de depresiones) al índice Surface del Continuo Mexicano de Elevaciones (CEM V3) en la península de Yucatán. Nuevamente, la línea corresponde al trazo aproximado de la ruta del Tren Maya. La profundidad de depresiones se calcula sustrayendo de la superficie una versión con hoyos rellenados.
Son datos que no se encuentran en la Plataforma de Googgle Earth Engine, y que fueron cargados como Assets personales accesibles desde GSIM. Éstos incluyen conjuntos de datos que fueron proporcionados por terceros y algunos aquellos que fueron generados por el CentroGeo (algunos datos pueden tener restricciones en su descarga). Actualmente se cuenta con los siguientes:
1. SPOT 6 – Colección que contienen algunas imágenes del satélite SPOT 6 proporcionadas por la SEMAR
2. SPOT 7 – Colección que contienen algunas imágenes del satélite SPOT 6 proporcionadas por la SEMAR
3. RapidEye – Colección que contienen algunas imágenes del satélite RapidEye proporcionadas por la CONABIO
4. WV2 – Colección que contienen algunas imágenes del satélite WorldView 2 adquiridas por el CentroGeo
5. CEM V3- Colección que contiene el continuo Mexicano de Elevaciones V3.0 generado por el INEGI (Algunos ejemplos con estos datos se mostraron en la sección anterior).
6. MDEAR LIDAR- Colección conformada por los modelos digitales de elevaciones de alta resolución LiDAR generados por el INEGI
7. DJIPhoto – Es una colección que contiene ortomosaicos RGB y modelos digitales de elevación (Superficie y Terreno, la altura se calcula en la app) generados a partir de fotografía aérea adquirida con un dron Phantom 4 con cámara CMOS y procedimiento fotogramétricos.
8. DJIP4MS – Es una colección que contiene ortomosaicos multiespectrales de 5 bandas generados a partir de fotografía aérea multiespectral adquirida con un dron DJI Phantom P4 multiespectral y procedimientos fotogramétricos.
9. Sentinel-2 RECI-TDHA – es una colección que contiene el resultado del análisis armónico de las series del índice de clorofila de la pared roja (RECI) calculado con Sentinel-2. El análisis abarcó 4 años (2 antes y 2 después de la fecha de referencia) y se cuenta con dos coberturas para México, 2017 y 2019.
10. TimeMapSt – Es una colección que contiene el análisis te tiempo de viaje (en minutos) desde calles en centros urbanos hasta cada pixel de 30 metros de México.
El siguiente mapa muestra el índice Height generado de la colección MDEAR LIDAR en área de la avenida Paseo de la Reforma en la CDMX. Note la distribución de los edificios más altos a lo largo de dicha avenida.

La colección Sentinel-2 RECI-TDHA cuenta con las siguientes bandas:
Bias – término constante del modelo
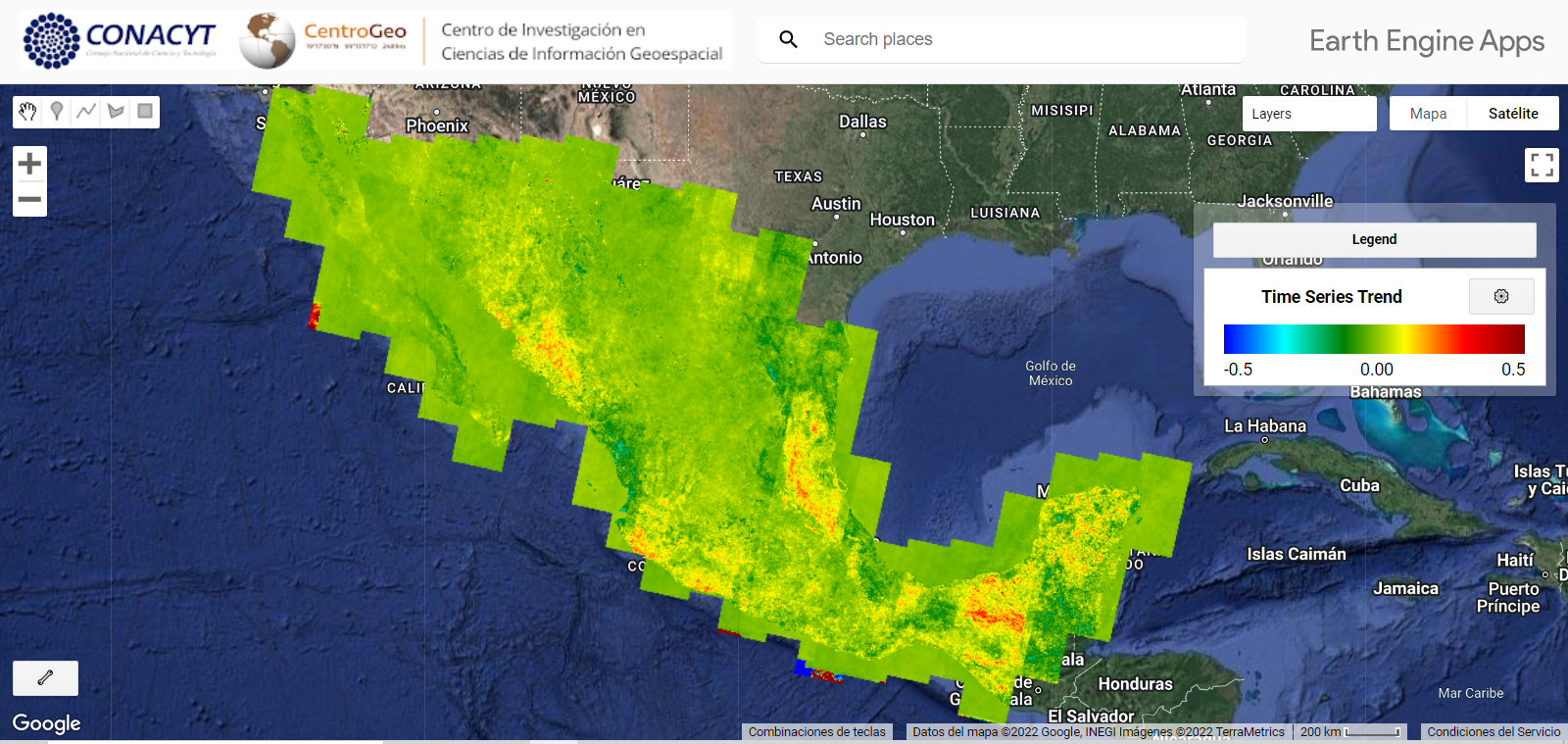
Trend – coeficiente del término lineal del modelo
Even – coeficiente del termino coseno del modelo
Odd – coeficiente del término seno del modelo
Residual – es el residuo del ajuste del modelo a los datos
El siguiente mapa muestra la banda Trend. (Nota: Use la herramienta da consulta puntual para graficar los coeficientes de un punto)
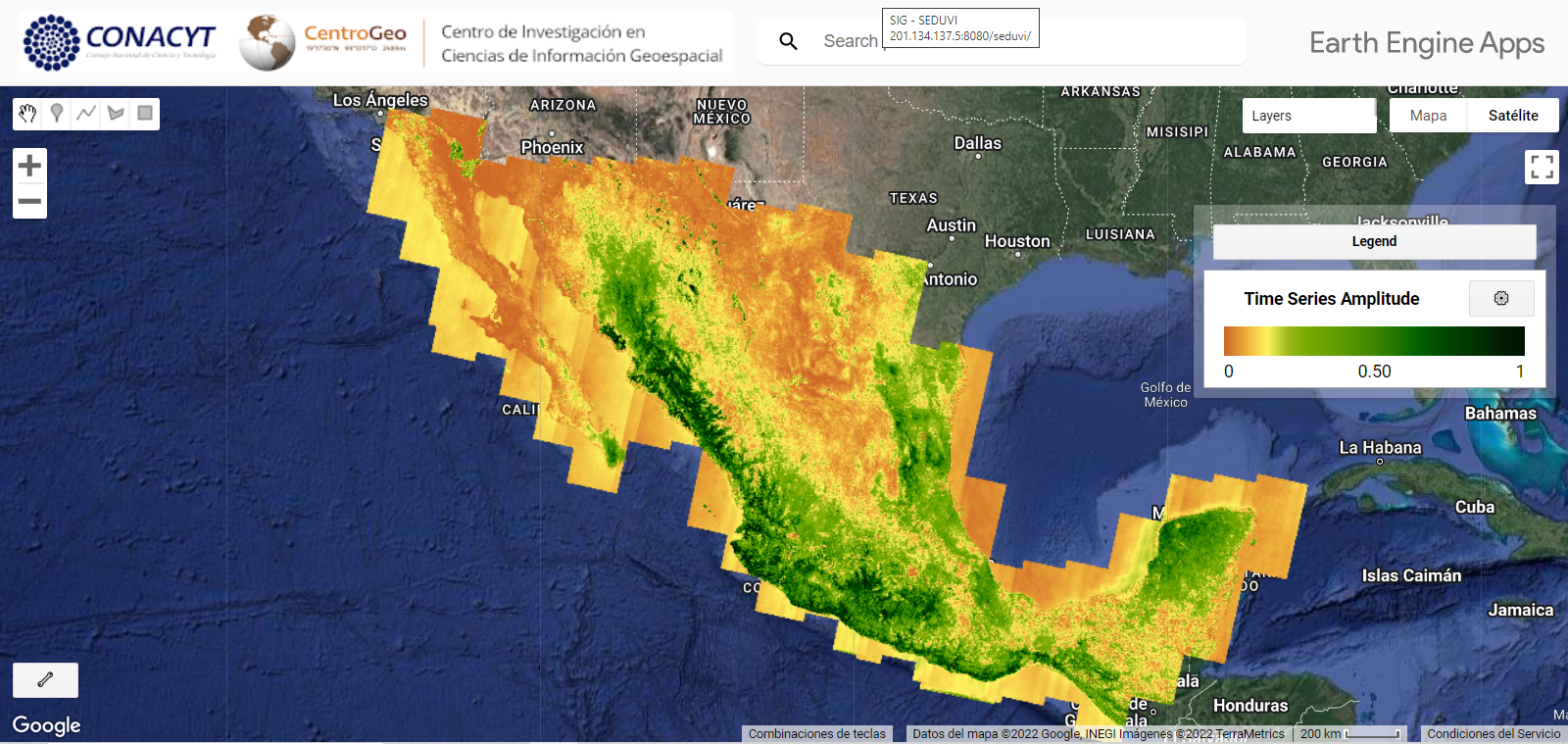
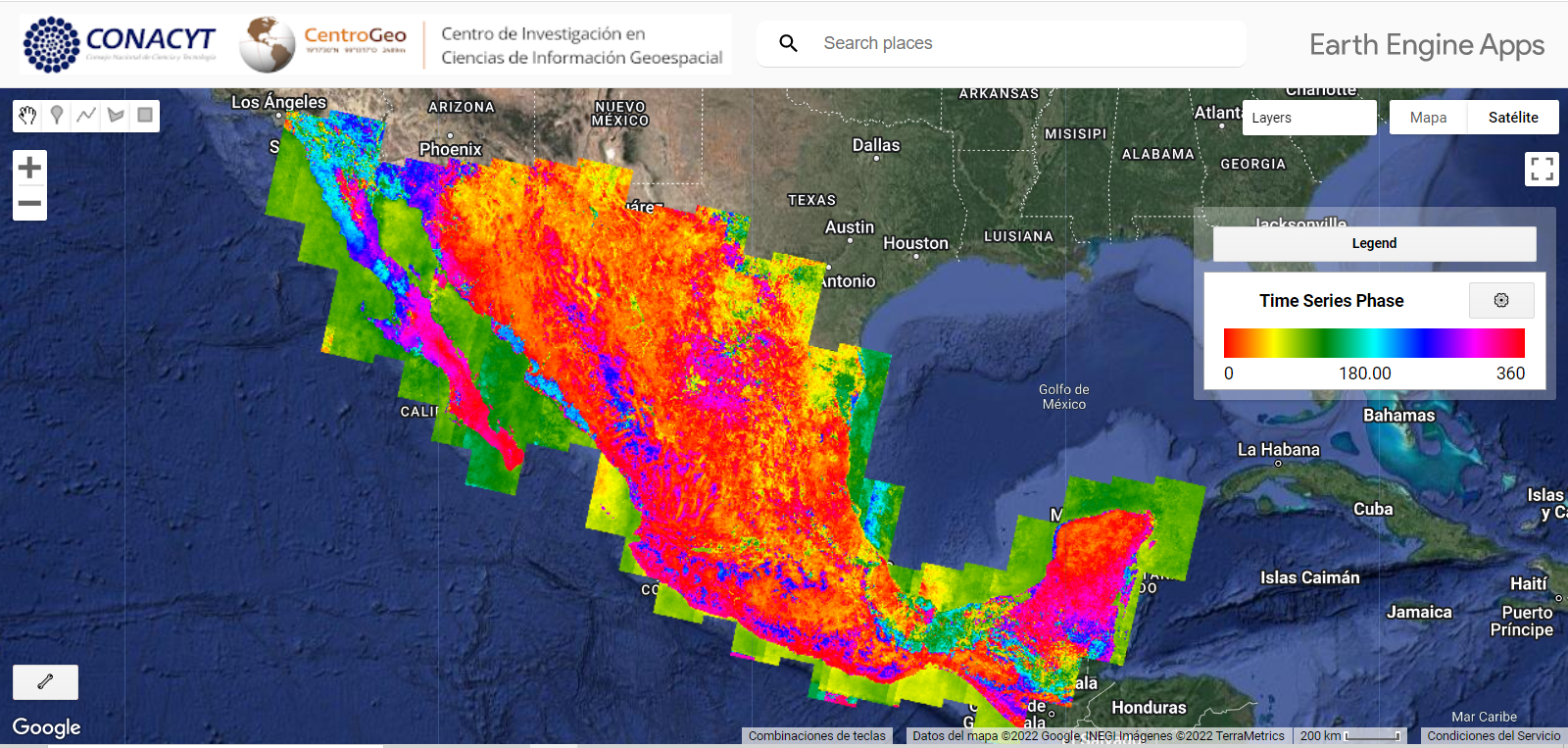
Algunos índices están pensados para ser calculados a partir de colecciones como la Sentinel-2 RECI-TDHA. Por ejemplo Amplitude y Phase se generan a partir de las bandas Odd y Even, y corresponden a la amplitud de oscilación y a la fase de oscilación en grados (1-ene es cero grado y 31-dic es 360 grados). Los siguientes dos mapas corresponden a dichos índices.
El tiempo de viaje de la colección TimeMapSt se estimó a partir de un modelo de desplazamiento que toma en cuenta la velocidad máxima de la red de caminos, la pendiente del terreno, los cuerpos de agua y la densidad de vegetación. El compuesto se generó tomando el sistema de referencia row-path WRS-2 de Landsat. Cada escena contiene tres bandas:
travel- es el tiempo de viaje mínimo (en minutos) estimado mediante la minimización de una función de costo acumulado.
origin-corresponde a la máscara de asentamientos considerados como el origen
velmax- corresponde a la velocidad máxima en el pixel (km/hra)
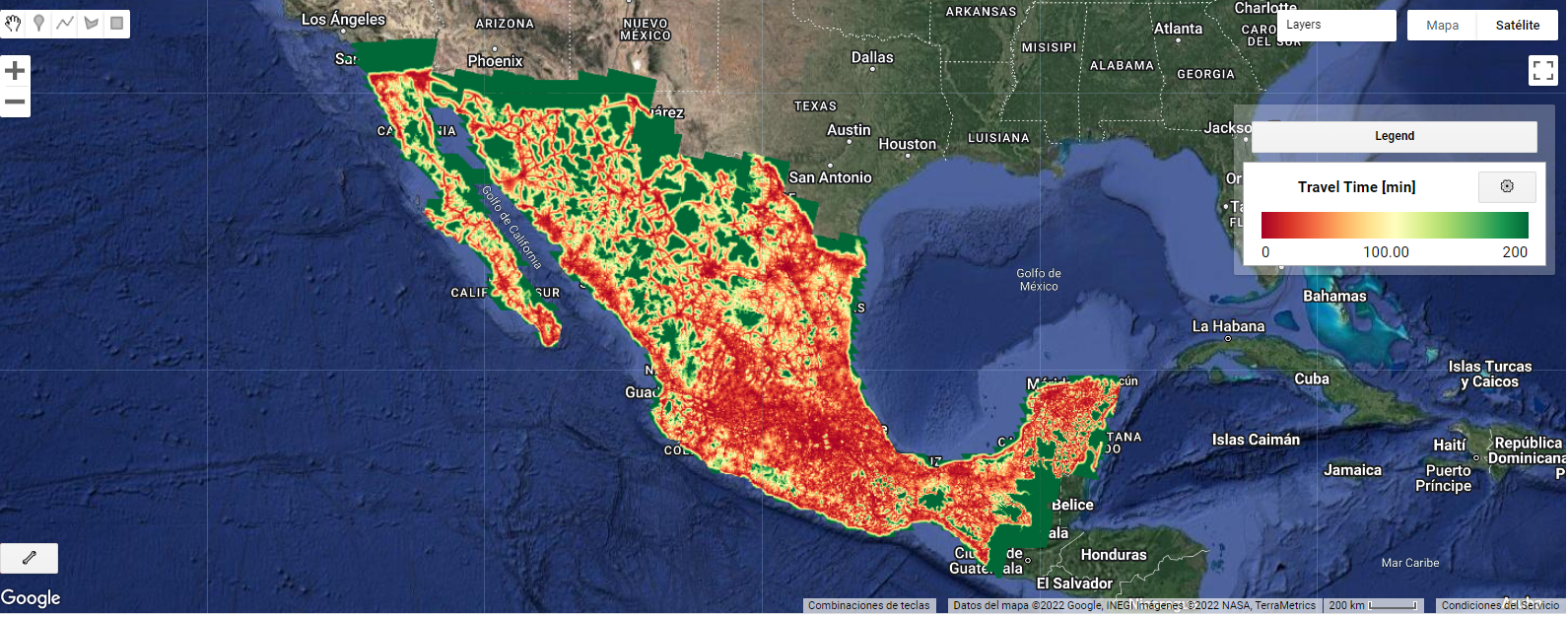
El índice Travel – Travel time [min] corresponde a la banda travel del compuesto TimeMapSt. En el siguiente mapa muestra una visualización del mismo, donde se ha usado un reductor MIN para reducir las discontinuidades entre las escenas.
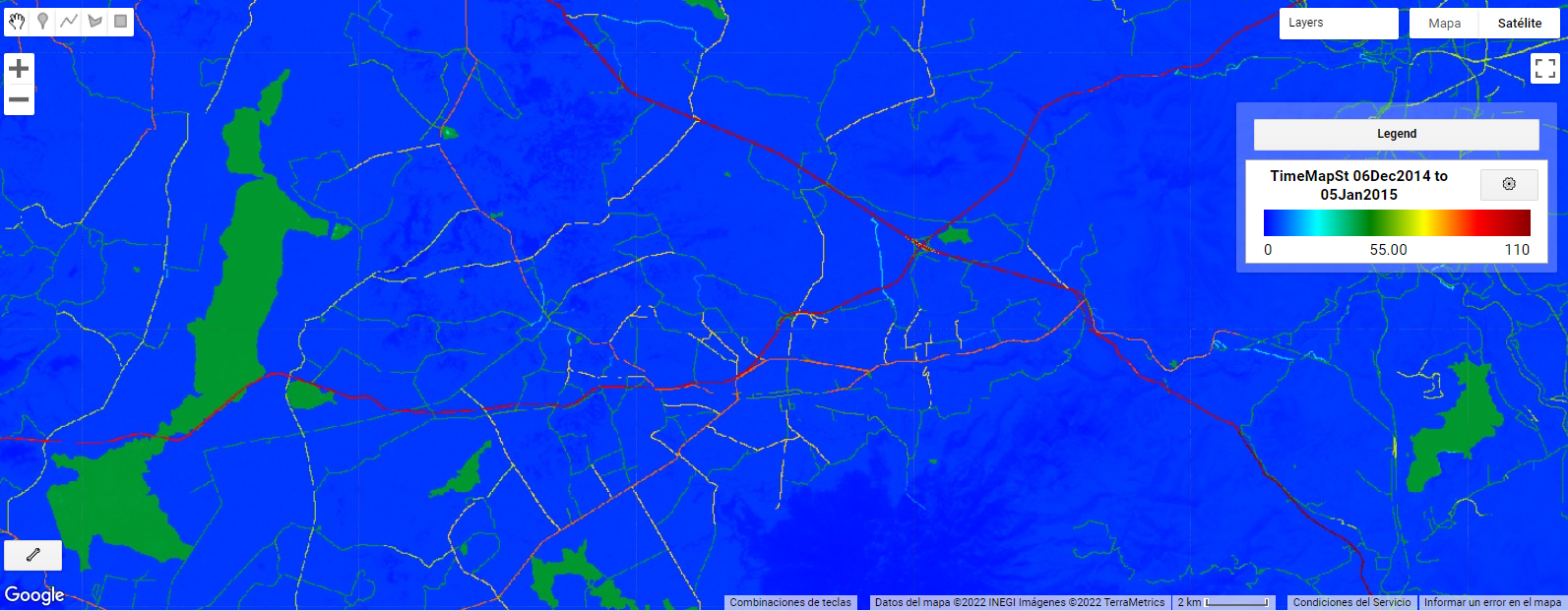
Las otras bandas sólo se pueden visualizar como compuesto. Para ello hay que habilitar la visualización del compuesto y desde la leyenda ir a configuración y seleccionar la opción de una banda, seleccionar la banda deseada y el mapa de colores. El siguiente mapa muestra la banda de velocidades (velmax) en escala de color, donde se ha hecho un acercamiento para poder apreciar la red de caminos, la cual tendrá velocidades superiores a las velocidades de campo traviesa.
Las colecciones basados en datos de dron cuentan con una resolución de 25cm, pero con una cobertura limitada a unos cuantos sitios, sobre todo sitios de búsqueda forense o sitios urbanos. (Nota: Para poder apreciar mejor el detalle es necesario desactivar la vista satelital, la cual tiene restricciones de acercamiento impuestas por el servidor de mapas de Google).
El siguiente mapa muestra el ortomosaico del sitio de búsqueda forense denominado La Bartolina, Tamaulipas. Se muestra la elevación del terreno con umbral para mostrar la extensión del lago cuando este alcanza un nivel de 45 metros sobre el nivel del mar.

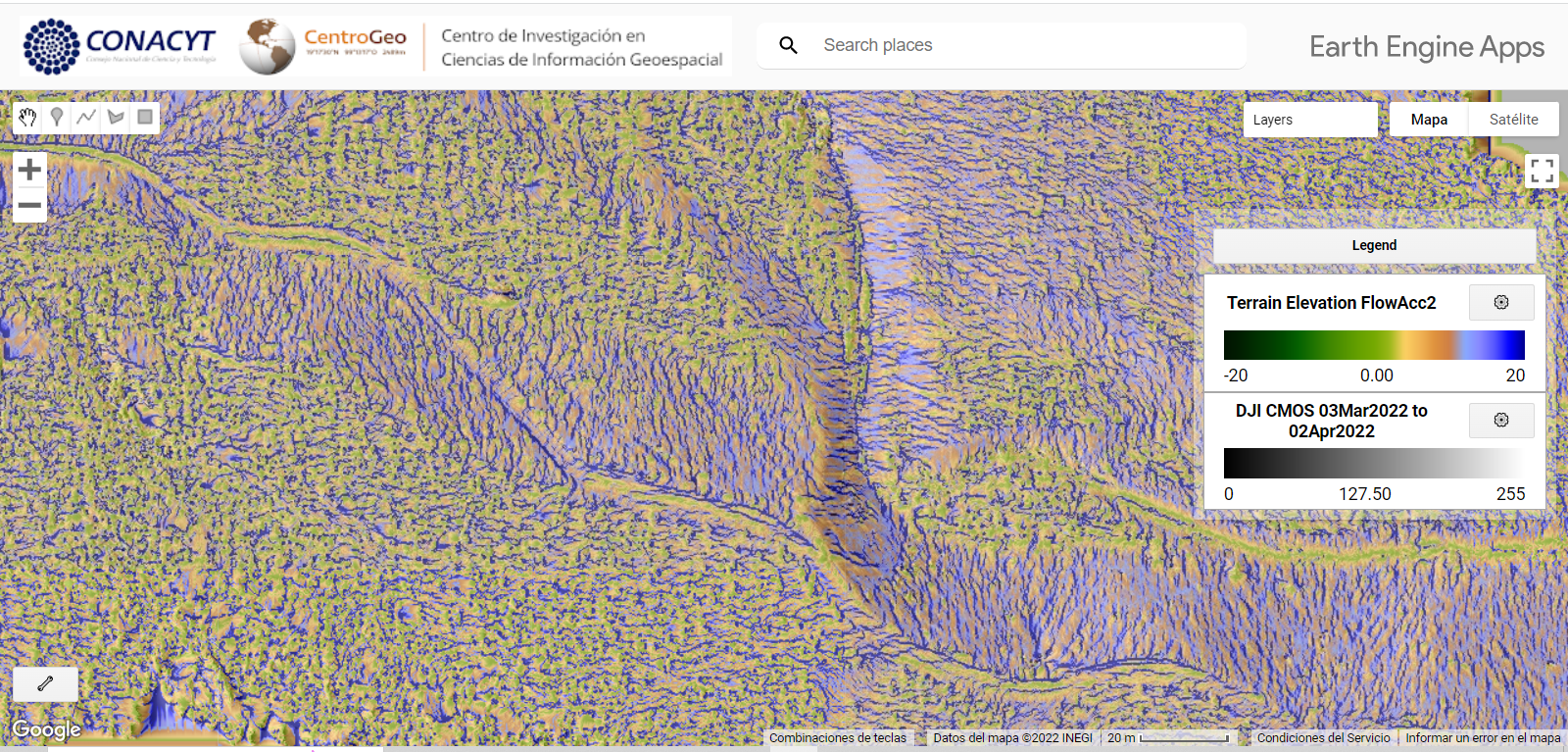
El siguiente mapa muestra la acumulación de flujo basado en el modelo digital de terreno generado a partir de fotogrametría digital para el área de búsqueda de la Barranca la Carnicería en Cocula, Guerrero. Note que el flujo acumulado es generado aplicando el operador espacial FlowAcc2 al índice Terrain.
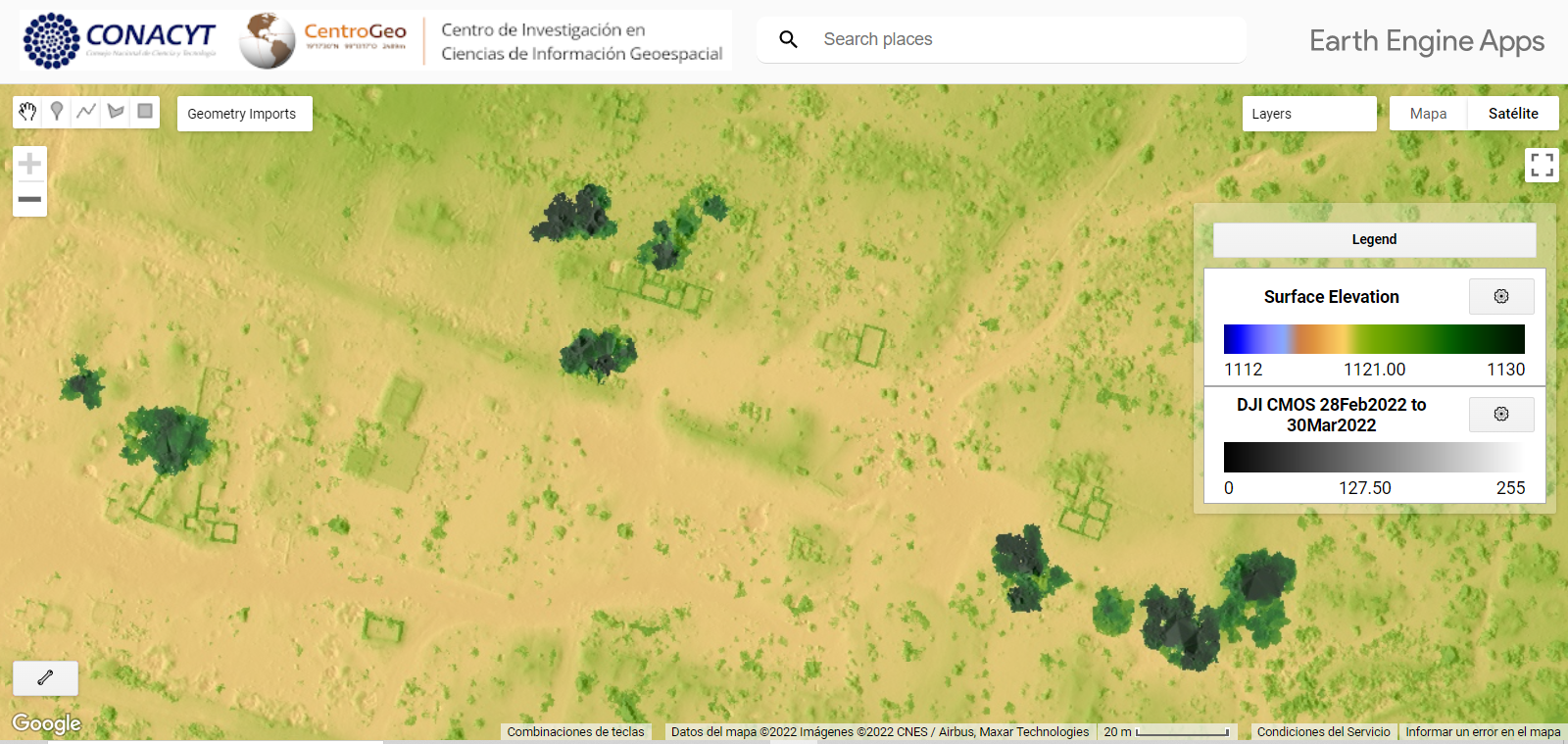
El siguiente mapa muestra la elevación semi transparente sobre el modelo sombreado del terreno en un área de búsqueda en el Ejido Zapata, del estado de Coahuila.
También en Coahuila, se encuentra este sitio conocido como Las Marraneras, donde actualmente se realizan búsquedas forenses. El mapa corresponde a la elevación de la superficie.
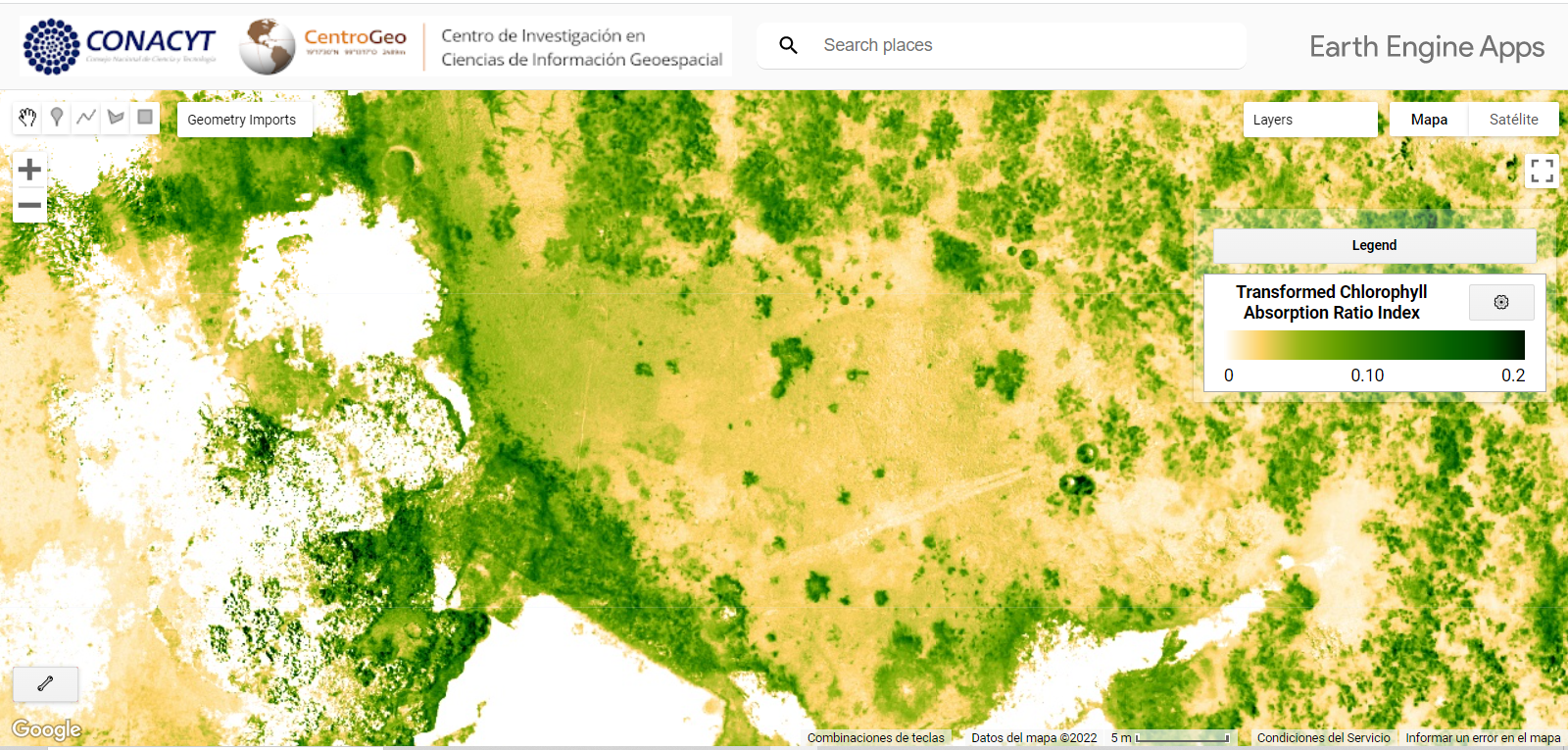
El siguiente mapa muestra la distribución del TCARI basado en imágenes multiespectrales (Pahntom 4P Multiespectral) para el sitio de búsqueda conocido como Los Gavilanes, en Coahuila.
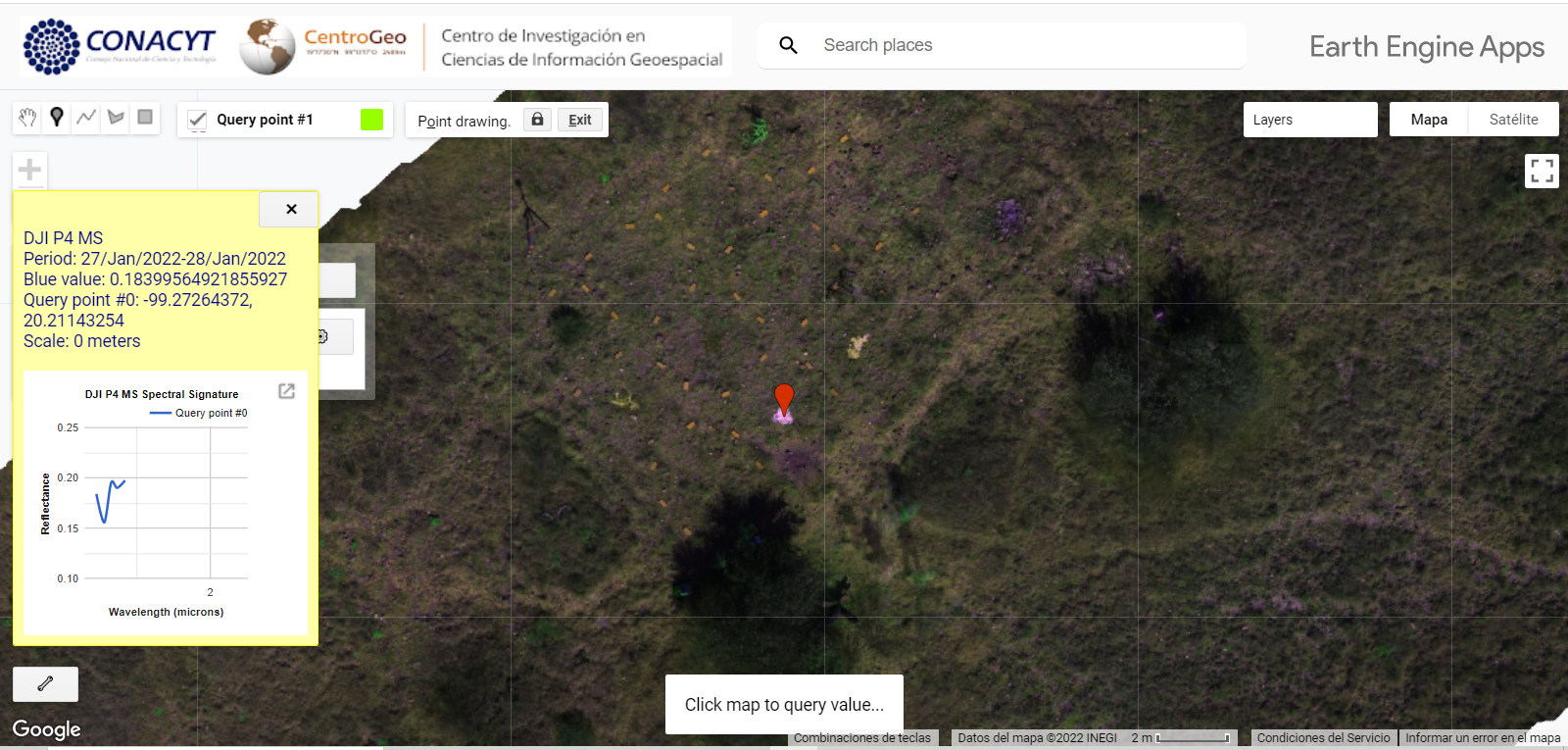
Este mapa muestra el ortomosaico de la imagen multiespectral en un sitio de prueba en Hidalgo. El punto marcado corresponde al área contaminada con cal. Se muestra la firma espectral del punto.
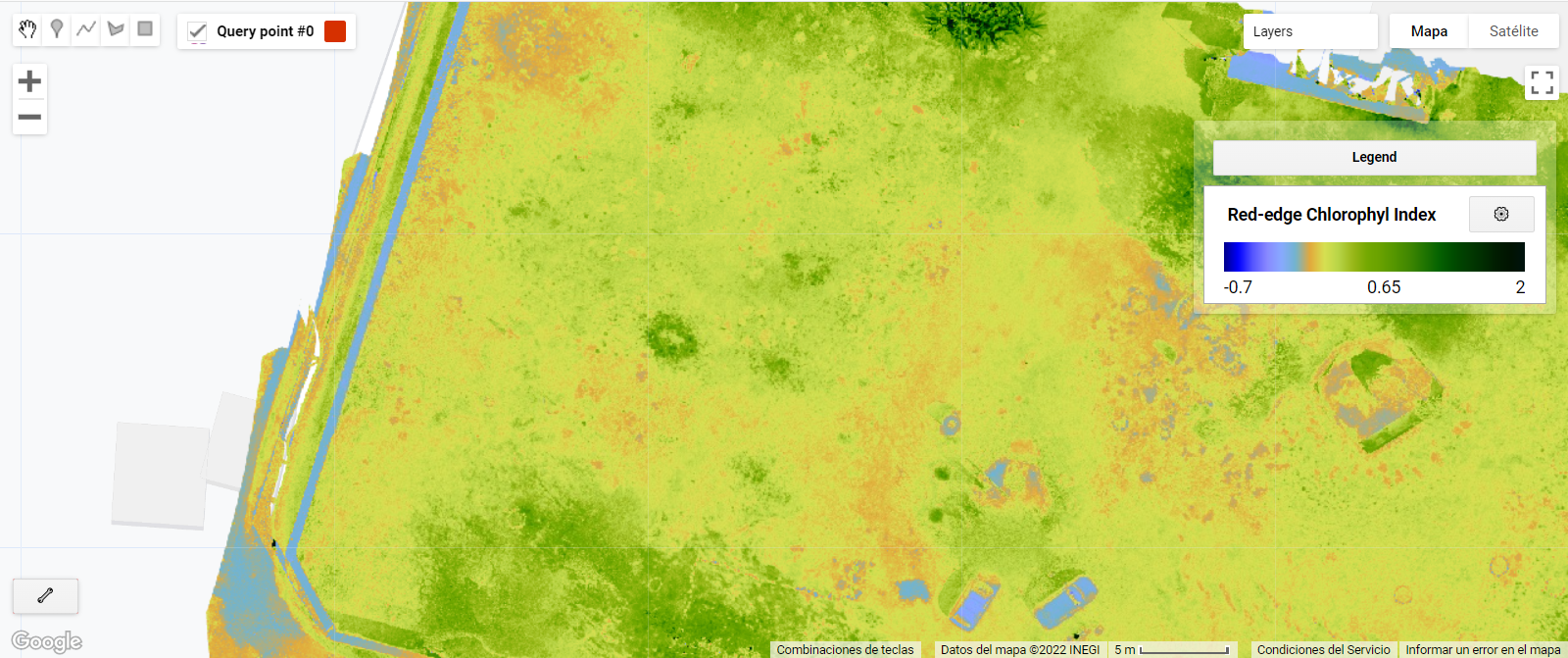
Este mapa corresponde al índice RECI en el sitio de prueba de MilpaAlta. Los manchones verdes sobre el área descubierta corresponden a sitios de inhumación controlada.
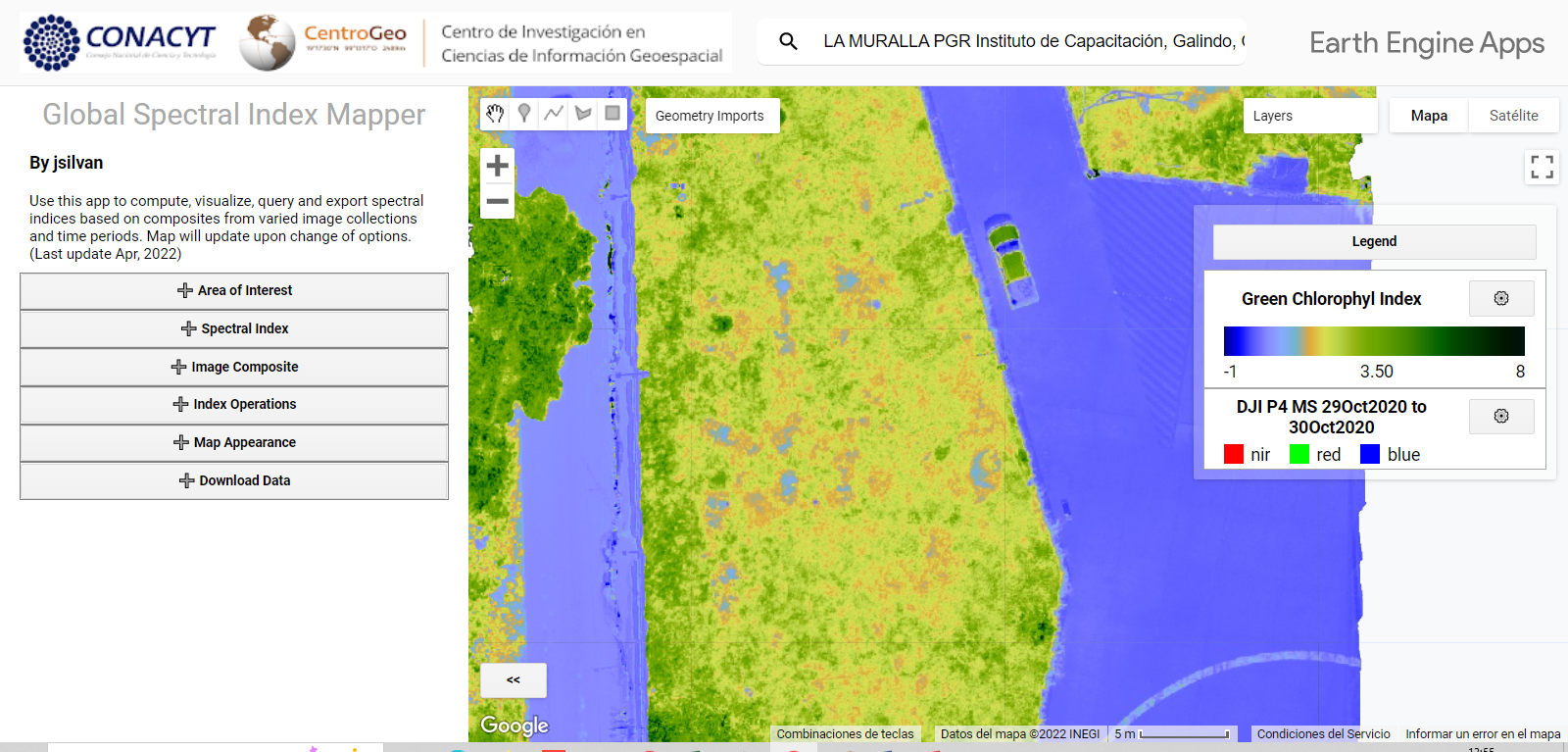
Distribución del GCI en el sitio de prueba La Muralla. Los valores bajos (tonos azules) en el sitio de inhumación dan cuenta de la inhibición del crecimiento de la vegetación, presumiblemente por causa los entierros.
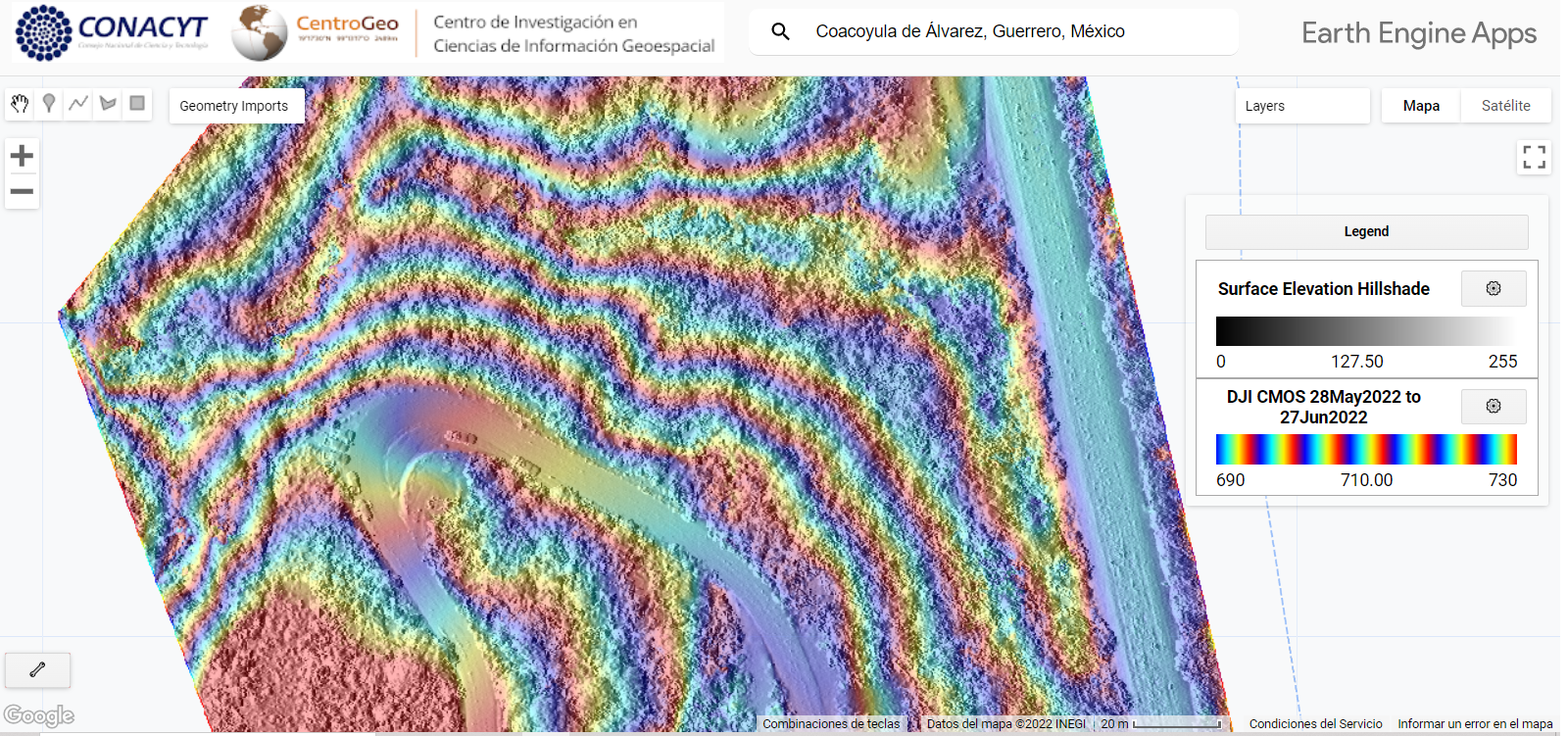
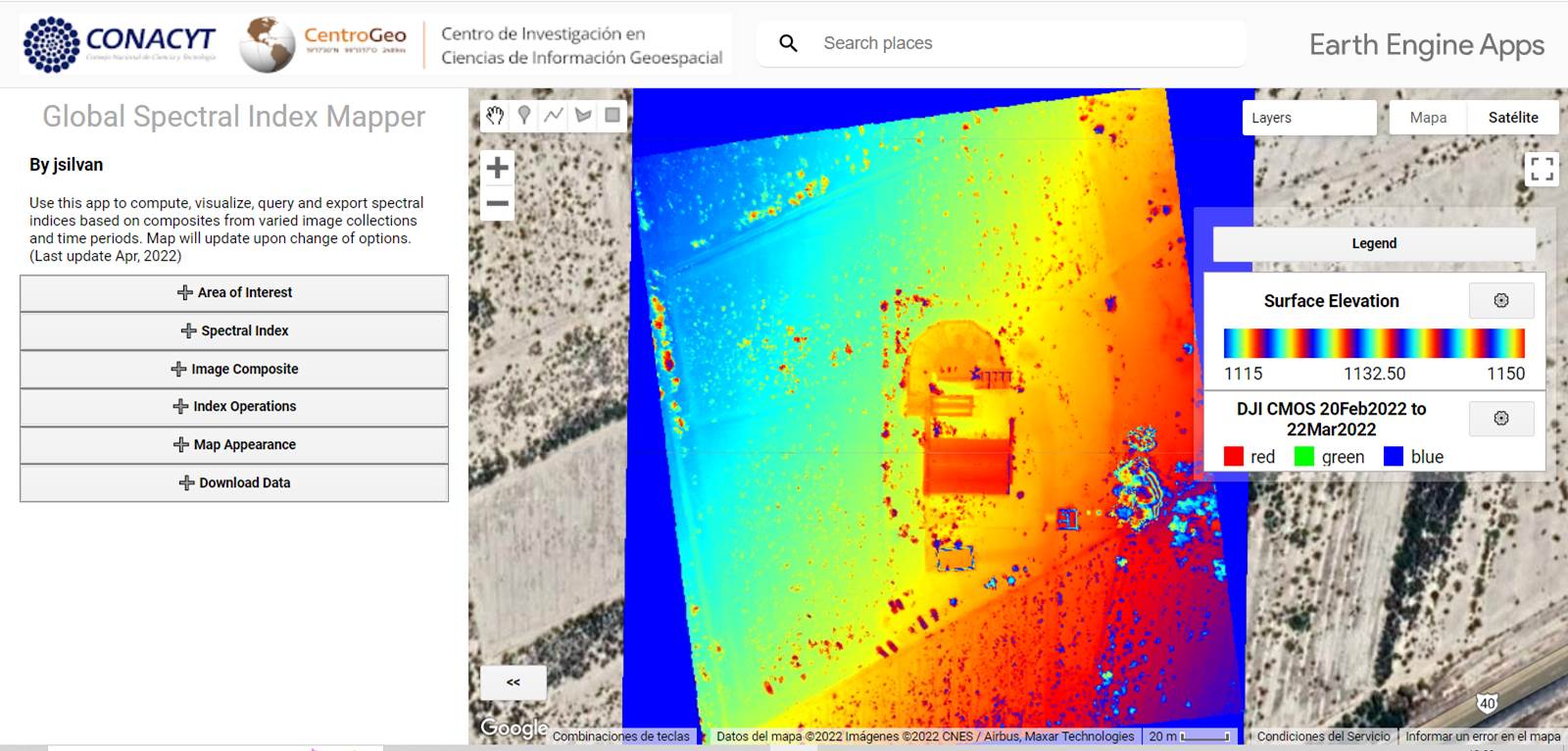
El siguiente mapa corresponde al sitio de búsqueda de Coacoyula, en el cual se muestra un sombreado del modelo digital de superficie sobrepuesto en el modelo digital de terreno con un mapa de colores periódicos para resaltar líneas al mismo nivel de elevación.